
Supply: OpenAI’s DALL·E 2 with immediate “a hyperrealistic image of a robotic studying the information on a laptop computer at a espresso store”
Welcome to the third version of Robo-Perception, a biweekly robotics information replace! On this submit, we’re excited to share a variety of recent developments within the discipline and spotlight progress in areas like movement, unfamiliar navigation, dynamic management, digging, agriculture, surgical procedure, and meals sorting.
A bioinspired robotic masters 8 modes of movement for adaptive maneuvering
In a world of fixed movement, a newly developed robotic named M4 (Multi-Modal Mobility Morphobot) has demonstrated the flexibility to modify between eight completely different modes of movement, together with rolling, flying, and strolling. Designed by researchers from Caltech’s Middle for Autonomous Programs and Applied sciences (CAST) and Northeastern College, the robotic can autonomously adapt its motion technique based mostly on its surroundings. Created by engineers Mory Gharib and Alireza Ramezani, the M4 undertaking goals to reinforce robotic locomotion by using a mix of adaptable elements and synthetic intelligence. The potential purposes of this innovation vary from medical transport to planetary exploration.

The robotic switches from its driving to its strolling state. Supply.
New navigation strategy for robots aiding visually impaired people
Talking of motion, researchers from the Hamburg College of Utilized Sciences have offered an revolutionary navigation algorithm for a cellular robotic help system based mostly on OpenStreetMap knowledge. The algorithm addresses the challenges confronted by visually impaired people in navigating unfamiliar routes. By using a three-stage course of involving map verification, augmentation, and technology of a navigable graph, the algorithm optimizes navigation for this person group. The research highlights the potential of OpenStreetMap knowledge to reinforce navigation purposes for visually impaired people, carrying implications for the development of robotics options that may cater to particular person necessities by means of knowledge verification and augmentation.

This autonomous car goals to information visually impaired people. Supply.
A novel approach enhances robotic management in dynamic environments
Alongside the identical traces as new environments, researchers from MIT and Stanford College have developed a novel machine-learning approach that enhances the management of robots, resembling drones and autonomous autos, in quickly altering environments. The strategy leverages insights from management concept to create efficient management methods for advanced dynamics, like wind impacts on flying autos. This system holds potential for a variety of purposes, from enabling autonomous autos to adapt to slippery highway situations to bettering the efficiency of drones in difficult wind situations. By integrating realized dynamics and control-oriented buildings, the researchers’ strategy presents a extra environment friendly and efficient technique for controlling robots, with implications for varied varieties of dynamical programs in robotics.

Robotic that would have improved management in several environments. Supply.
Burrowing robots with origami ft
Robots have been bettering in areas above floor for some time however at the moment are additionally advancing in underground areas, researchers from the College of California Berkeley and the College of California Santa Cruz have unveiled a brand new robotics strategy that makes use of origami-inspired foldable ft to navigate granular environments. Drawing inspiration from organic programs and their anisotropic forces, this strategy harnesses reciprocating burrowing methods for exact directional movement. By using easy linear actuators and leveraging passive anisotropic pressure responses, this research paves the way in which for streamlined robotic burrowing, shedding mild on the prospect of simplified but efficient underground exploration and navigation. This revolutionary integration of origami ideas into robotics opens the door to enhanced subterranean purposes.
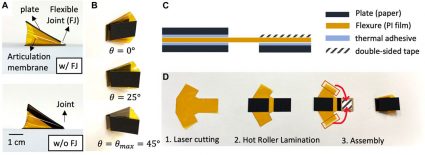
The prototype for the foot and its technique for fabrication. Supply.
Modern processes in agricultural robotics
On the earth of agriculture, a researcher from Carnegie Mellon College lately explored the synergy between scientific phenotyping and agricultural robotics in a Grasp’s Thesis. Their research delved into the very important function of correct plant trait measurement in growing improved plant varieties, whereas additionally highlighting the promising realm of robotic plant manipulation in agriculture. Envisioning superior farming practices, the researcher emphasizes duties like pruning, pollination, and harvesting carried out by robots. By proposing revolutionary strategies resembling 3D cloud evaluation for seed counting and vine segmentation, the research goals to streamline knowledge assortment for agricultural robotics. Moreover, the creation and use of 3D skeletal vine fashions exhibit the potential for optimizing grape high quality and yield, paving the way in which for extra environment friendly agricultural practices.
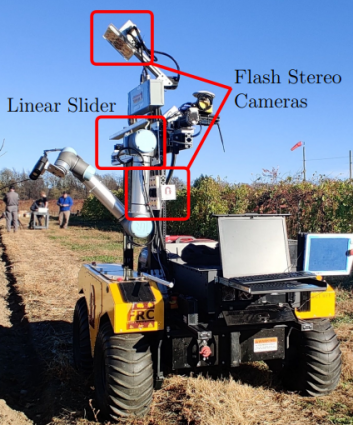
A Robotic knowledge seize platform that was launched. Supply.
Smooth robotic catheters may assist enhance minimally invasive surgical procedure
Shifting our focus to surgical procedure, a crew of mechanical engineers and medical researchers from the College of Maryland, Johns Hopkins College, and the College of Maryland Medical College has developed a pneumatically actuated delicate robotic catheter system to reinforce management throughout minimally invasive surgical procedures. The system permits surgeons to insert and bend the catheter tip with excessive accuracy concurrently, doubtlessly bettering outcomes in procedures that require navigating slim and sophisticated physique areas. The researchers’ strategy simplifies the mechanical and management structure by means of pneumatic actuation, enabling intuitive management of each bending and insertion with out guide channel pressurization. The system has proven promise in precisely reaching cylindrical targets in exams, benefiting each novice and expert surgeons.
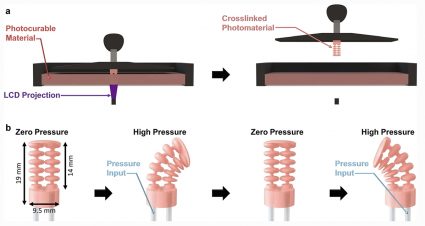
Determine exhibiting manufacturing and operation of soppy robotic catheter tip utilizing printing course of for actuator and pneumatic pressurization to regulate catheter bending. Supply.
Robotic system enhances poultry dealing with effectivity
Lastly, within the meals world, researchers have launched an revolutionary robotic system designed to effectively choose and place deformable poultry items from cluttered bins. The structure integrates a number of modules, enabling exact manipulation of delicate poultry objects. A complete analysis strategy is proposed to evaluate the system’s efficiency throughout varied modules, shedding mild on successes and challenges. This development holds the potential to revolutionize meat processing and the broader meals trade, addressing calls for for elevated automation.
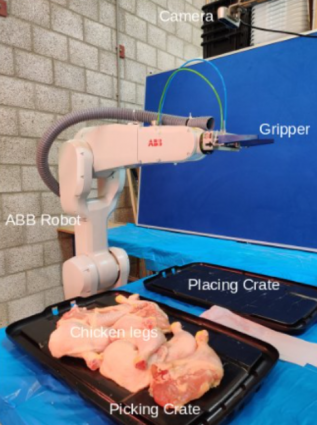
An experimental setup. Supply.
This array of current developments spanning varied fields reveals the versatile and ever-evolving character of robotics know-how, unveiling recent avenues for its integration throughout completely different sectors. The regular evolution in robotics exemplifies the continuing endeavors and the potential ramifications these developments may have within the occasions forward.
Sources:
- New Bioinspired Robotic Flies, Rolls, Walks, and Extra. (2023, June 27). Middle for Autonomous Programs and Applied sciences. Caltech College.
- Software of Path Planning for a Cell Robotic Help System Primarily based on OpenStreetMap Information. Stahr, P., Maaß, J., & Gärtner, H. (2023). Robotics, 12(4), 113.
- A less complicated technique for studying to regulate a robotic. (2023, July 26). MIT Information | Massachusetts Institute of Expertise.
- Environment friendly reciprocating burrowing with anisotropic origami ft. Kim, S., Treers, L. Ok., Huh, T. M., & Stuart, H. S. (2023, July 3). Frontiers.
- Phenotyping and Skeletonization for Agricultural Robotics. The Robotics Institute Carnegie Mellon College. (n.d.). Retrieved August 10, 2023.
- Pneumatically managed delicate robotic catheters provide accuracy, flexibility. (n.d.). Retrieved August 10, 2023.
- Superior Robotic System for Environment friendly Choose-and-Place of Deformable Poultry in Cluttered Bin: A Complete Analysis Strategy. Raja, R., Burusa, A. Ok., Kootstra, G., & van Henten, E. (2023, August 7). TechRviv.

Shaunak Kapur
is a part of Robohub’s volunteering crew, and soon-to-be senior in highschool (Texas). Shaun has been captivated by robotics from a younger age.
Shaunak Kapur
is a part of Robohub’s volunteering crew, and soon-to-be senior in highschool (Texas). Shaun has been captivated by robotics from a younger age.

{kind=link}