

|
Hearken to this text  |
Whereas humanoid robots have burst into mainstream consideration prior to now yr, and increasingly corporations have launched their very own fashions, many function equally. The everyday humanoid makes use of arms and grippers to deal with objects, and their inflexible legs present a mode of transportation. Researchers on the Toyota Analysis Institute, or TRI, stated they wish to take humanoids a step additional with the Punyo robotic.
Punyo isn’t a conventional humanoid robotic in that it doesn’t but have legs. To this point, TRI‘s crew is working with simply the torso of a robotic and growing manipulation expertise.
“Our mission is to assist folks with on a regular basis duties in our houses and elsewhere,” stated Alex Alspach, one in every of TRI’s tech leads for whole-body manipulation, in a video (see above). “Many of those manipulation duties require extra than simply our fingers and fingers.”
When people have to hold a big object, we don’t simply use our arms to hold it, he defined. We would lean the thing towards our chest to lighten the load on our arms and use our backs to push via doorways to achieve our vacation spot.
Manipulation that makes use of the entire physique is difficult for humanoids, the place stability is a significant difficulty. Nevertheless, the researchers at TRI designed its robotic to do exactly that.
“Punyo does issues in another way. Profiting from its entire physique, it could actually carry greater than it may just by urgent with outstretched fingers,” added Andrew Beaulieu, one in every of TRI’s tech leads for whole-body manipulation. “Softness, tactile sensing, and the flexibility to make a number of contact advantageously permit higher object manipulation.”
TRI stated that the phrase “punyo” is a Japanese phrase that elicits the picture of a cute but resilient robotic. TRI’s said aim was to create a robotic that’s gentle, interactive, inexpensive, secure, sturdy, and succesful.
 Study from Agility Robotics, Amazon, Disney, Teradyne and plenty of extra.
Study from Agility Robotics, Amazon, Disney, Teradyne and plenty of extra.
Robotic contains gentle limbs with inside sensors
Punyo’s fingers, arms, and chest are lined with compliant supplies and tactile sensors that permit it to really feel contact. The gentle supplies permit the robotic’s physique to evolve with the objects it’s manipulating.
Beneath it are two “exhausting” robotic arms, a torso body, and a waist actuator. TRI says it aimed to mix the precision of a conventional robotic with the compliance, influence resistance, and sensing simplicity of gentle robotic programs.
The whole lot of Punyo’s arms are lined in air-filled bladders or bubbles. These bubbles join by way of a tube to a strain sensor. This sensor can really feel forces utilized to the outer surfaces of the bubble.
Every bubble can be individually pressurized to a desired stiffness, and add round 5 cm of compliance to the floor of the robotic’s arms.
As an alternative of conventional grippers, Punyo has “paws” made up of a single high-friction latex bubble with a digital camera inside. The crew printed the within of those bubbles with a dot sample. The digital camera watches for deformities on this sample to estimate forces.
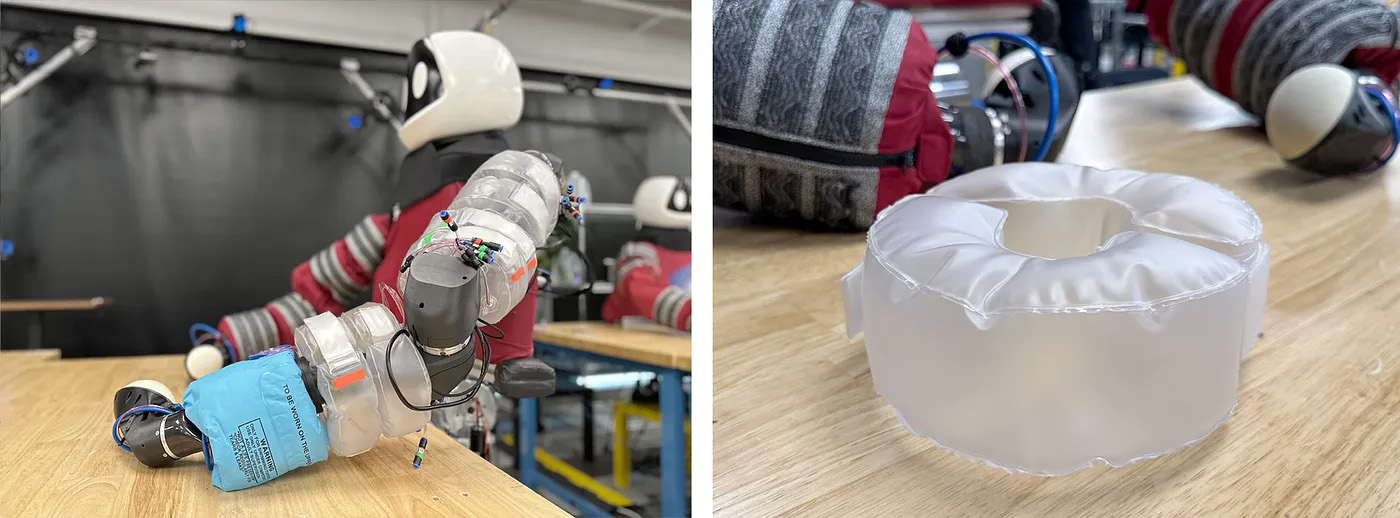
Left: Underneath Punyo’s sleeves are bubbles, air tubes, and strain sensors that add compliance and tactile sensing to the arms. Proper: Closeup of a pair of arm bubbles. | Supply: Toyota Analysis Institute
Punyo learns to make use of full-body manipulation
Punyo discovered contact-rich insurance policies utilizing two strategies: diffusion coverage and example-guided reinforcement studying. TRI introduced its diffusion coverage methodology final yr. With this methodology, the robotic makes use of human demonstrations to study strong sensorimotor insurance policies for hard-to-model duties.
Instance-guided reinforcement studying is a technique that requires duties to be modeled in simulation and with a small set of demonstrations to information the robotic’s exploration. TRI stated it makes use of this sort of studying to attain strong manipulation insurance policies for duties it could actually mannequin in simulation.
When the robotic can see demonstrations of those duties it could actually extra effectively study them. It additionally provides TRI crew extra room to affect the fashion of movement the robotic makes use of to attain the duty.
The crew makes use of adversarial movement priors (AMP), that are historically used for stylizing computer-animated characters, to include human movement imitation into its reinforcement pipeline.
Reinforcement studying does require the crew to mannequin duties in simulation for coaching. To do that, TRI used a model-based planner for demonstrations as an alternative of teleoperation. It referred to as this course of “plan-guided reinforcement studying.”
TRI claimed that utilizing a planner makes longer-horizon duties which are troublesome to teleoperate potential. The crew also can routinely generate any variety of demonstrations, decreasing its pipeline’s dependence on human enter. This strikes TRI nearer to scaling up the variety of duties tha tPunyo can deal with.

{kind=link}