

Analysis crew : Maxence LEVEZIEL, Wissem HAOUAS, Michaël GAUTHIER, Guillaume J. LAURENT, Redwan DAHMOUCHE.
By Redwan Dahmouche
Velocity and precision are two main points in robotics and in Trade of the Future (often known as Trade 4.0). Inside this framework, RoMoCo analysis crew of AS2M division at FEMTO-ST Institute has developed MiGriBot, a miniature robotic in a position to carry out 720 pick-and-place operations of sub-millimeter objects per minute. The outcomes of this analysis work have been printed in Science Robotics.
These performances are made doable due to its structure, that enables it to grip and manipulate micro-objects barely seen to the bare eye (from 40 micrometers to a number of hundred micrometers). The truth is, the place different microrobots have a inflexible end-effector, MiGriBot relies on a precept with an articulated finish. This articulated finish permits to drive a microgripper with none wire or embedded actuator. The second benefit of this robotic is that each one its levels of mobility, together with those from the microgripper on the articulated finish, are operated from the bottom of the robotic, making its cell elements very light-weight. Lastly, its robotic construction occupies a floor of solely 20x20mm2. This degree of compactness is achieved by utilizing Silicon for the inflexible components, a polymer (Polydimethylsiloxane – PDMS) as versatile joints and piezoelectric actuators outfitted with place sensors. MiGriBot is subsequently lighter, extra compact and sooner than present robotic micro-manipulators.

MiGriBot holding a cylindrical ruby with a diameter of 700µm and a thickness of 200µm.
Whereas the quickest industrial pick-and-place robots don’t exceed 250 cycles per minute, the mixture of all of the options of this robotic: comfortable joints, small footprint, built-in gripping, light-weight construction and closed-loop management of the quick actuators permits MiGriBot to achieve 720 pick-and-place operations per minute with about one micrometer accuracy. Within the blink of an eye fixed, MiGRiBot may have manipulated 5 micro-objects, which suggests that it’s going to have approached, grabbed, moved and launched an object 5 occasions successively.
This robotic might be used to assemble Micro-Electro-Mechanical and Optical Techniques (MEMS/MOEMS) used within the electronics trade, the place the manufacturing throughput is more and more excessive. Due to its velocity and compactness, greater than 2000 robots will be positioned in 1m2 to carry out a couple of million operations per second. Rising work charges will enhance the productiveness and competitiveness of producers, which can encourage the relocation of manufacturing to Europe, America and nations with excessive labor prices. Purposes in watch trade, medical instrumentation, aerospace, and different fields are additionally doable.
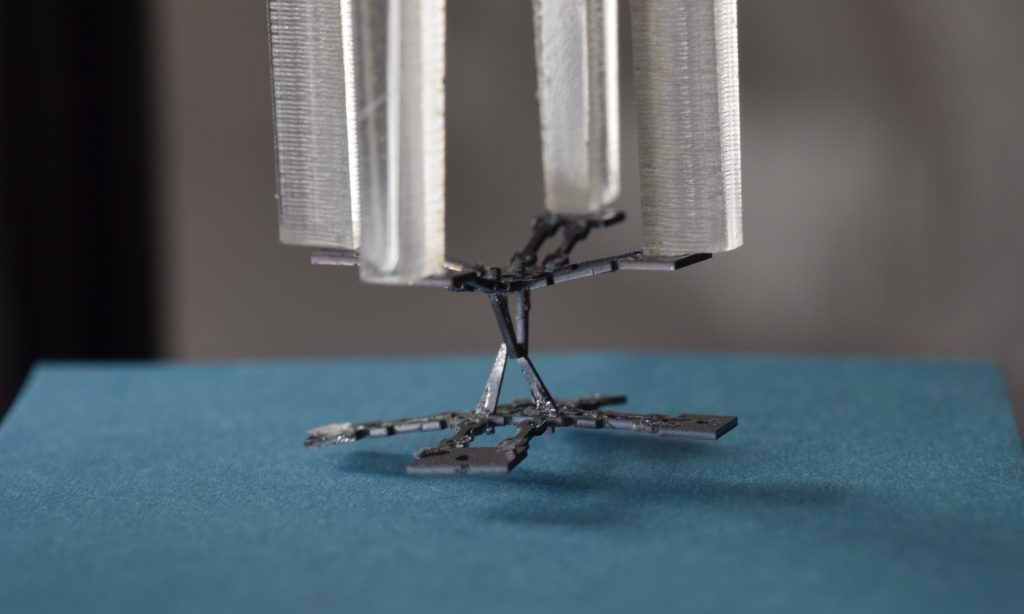
MiGriBot holding one other parallel construction exhibiting the capability of the microrobot to control heavy objects.
This work was funded by the ANR MiniSoRo venture (ANR-19-CE10-0004) and by Grand Besançon Métropole.
Analysis crew: Maxence LEVEZIEL, Wissem HAOUAS, Michaël GAUTHIER, Guillaume J. LAURENT, Redwan DAHMOUCHE (affiliate professor at université de Franche-Comté, venture chief and head of the analysis crew: redwan.dahmouche@univ-fcomte.fr).
tags: c-Analysis-Innovation, Manipulation
![]()
FEMTO-ST Institute
consists by the Université de Franche-Comté (UFC), the Ecole Nationale Supérieure de Mécanique et Microtechniques (ENSMM) and the Université de Technologie Belfort-Montbéliard (UTBM) and Centre Nationwide de la Recherche Scientifique (CNRS).
![]()
FEMTO-ST Institute
consists by the Université de Franche-Comté (UFC), the Ecole Nationale Supérieure de Mécanique et Microtechniques (ENSMM) and the Université de Technologie Belfort-Montbéliard (UTBM) and Centre Nationwide de la Recherche Scientifique (CNRS).

{kind=link}