

Delicate robots, or these made with supplies like rubber, gels and material, have benefits over their tougher, heavier counterparts, particularly in relation to duties that require direct human interplay. Robots that might safely and gently assist folks with restricted mobility grocery store, put together meals, dress, and even stroll would undoubtedly be life-changing.
Nevertheless, comfortable robots at the moment lack the power wanted to carry out these types of duties. This long-standing problem — making comfortable robots stronger with out compromising their capacity to softly work together with their setting — has restricted the event of those gadgets.
With the connection between power and softness in thoughts, a workforce of Penn Engineers has devised a brand new electrostatically managed clutch which allows a comfortable robotic hand to have the ability to maintain 4 kilos – in regards to the weight of a bag of apples – which is 40 occasions greater than the hand might carry with out the clutch. As well as, the power to carry out this activity requiring each a comfortable contact and power was achieved with solely 125 volts of electrical energy, a 3rd of the voltage required for present clutches.
Their secure, low-power method might additionally allow wearable comfortable robotic gadgets that will simulate the feeling of holding a bodily object in augmented- and virtual-reality environments.
James Pikul, Assistant Professor in Mechanical Engineering and Utilized Mechanics (MEAM), Kevin Turner, Professor and Chair of MEAM with a secondary appointment in Supplies Science Engineering, and their Ph.D. college students, David Levine, Gokulanand Iyer and Daelan Roosa, printed a examine in Science Robotics describing a brand new, fracture-mechanics-based mannequin of electroadhesive clutches, a mechanical construction that may management the stiffness of soppy robotic supplies.
Utilizing this new mannequin, the workforce was capable of notice a clutch 63 occasions stronger than present electroadhesive clutches. The mannequin not solely elevated drive capability of a clutch used of their comfortable robots, it additionally decreased the voltage required to energy the clutch, making comfortable robots stronger and safer.
Present comfortable robotic fingers can maintain small objects, equivalent to an apple for instance. Being comfortable, the robotic hand can delicately grasp objects of varied shapes, perceive the vitality required to carry them, and turn out to be stiff or tense sufficient to select an object up, a activity just like how we grasp and maintain issues in our personal fingers. An electroadhesive clutch is a skinny machine that enhances the change of stiffness within the supplies which permits the robotic to carry out this activity. The clutch, just like a clutch in a automotive, is the mechanical connection between shifting objects within the system. Within the case of electroadhesive clutches, two electrodes coated with a dielectric materials turn out to be attracted to one another when voltage is utilized. The attraction between the electrodes creates a friction drive on the interface that retains the 2 plates from slipping previous one another. The electrodes are connected to the versatile materials of the robotic hand. By turning the clutch on with {an electrical} voltage, the electrodes stick to one another, and the robotic hand holds extra weight than it might beforehand. Turning the clutch off permits the plates to slip previous one another and the hand to loosen up, so the item might be launched.
Conventional fashions of clutches are primarily based on a easy assumption of Coulombic friction between two parallel plates, the place friction retains the 2 plates of the clutch from sliding previous one another. Nevertheless, this mannequin doesn’t seize how mechanical stress is nonuniformly distributed within the system, and due to this fact, doesn’t predict clutch drive capability nicely. It is usually not strong sufficient for use to develop stronger clutches with out utilizing excessive voltages, costly supplies, or intensive manufacturing processes. A robotic hand with a clutch created utilizing the friction mannequin could possibly decide up a whole bag of apples, however would require excessive voltages which make it unsafe for human interplay.
“Our method tackles the drive capability of clutches on the mannequin degree,” says Pikul. “And our mannequin, the fracture-mechanics-based mannequin, is exclusive. As an alternative of making parallel plate clutches, we primarily based our design on lap joints and examined the place fractures may happen in these joints. The friction mannequin assumes that the stress on the system is uniform, which isn’t reasonable. In actuality, stress is concentrated at varied factors, and our mannequin helps us perceive the place these factors are. The ensuing clutch is each stronger and safer because it requires solely a 3rd of the voltage in comparison with conventional clutches.”
“The fracture mechanics framework and mannequin on this work have been used for the design of bonded joints and structural elements for many years,” says Turner. “What’s new right here is the applying of this mannequin to the design of electroadhesive clutches.”
The researchers’ improved clutch can now be simply built-in into present gadgets.
“The fracture-mechanics-based mannequin gives elementary perception into the workings of an electroadhesive clutch, serving to us perceive them greater than the friction mannequin ever might,” says Pikul. “We are able to already use the mannequin to enhance present clutches simply by making very slight modifications to materials geometry and thickness, and we will proceed to push the bounds and enhance the design of future clutches with this new understanding.”
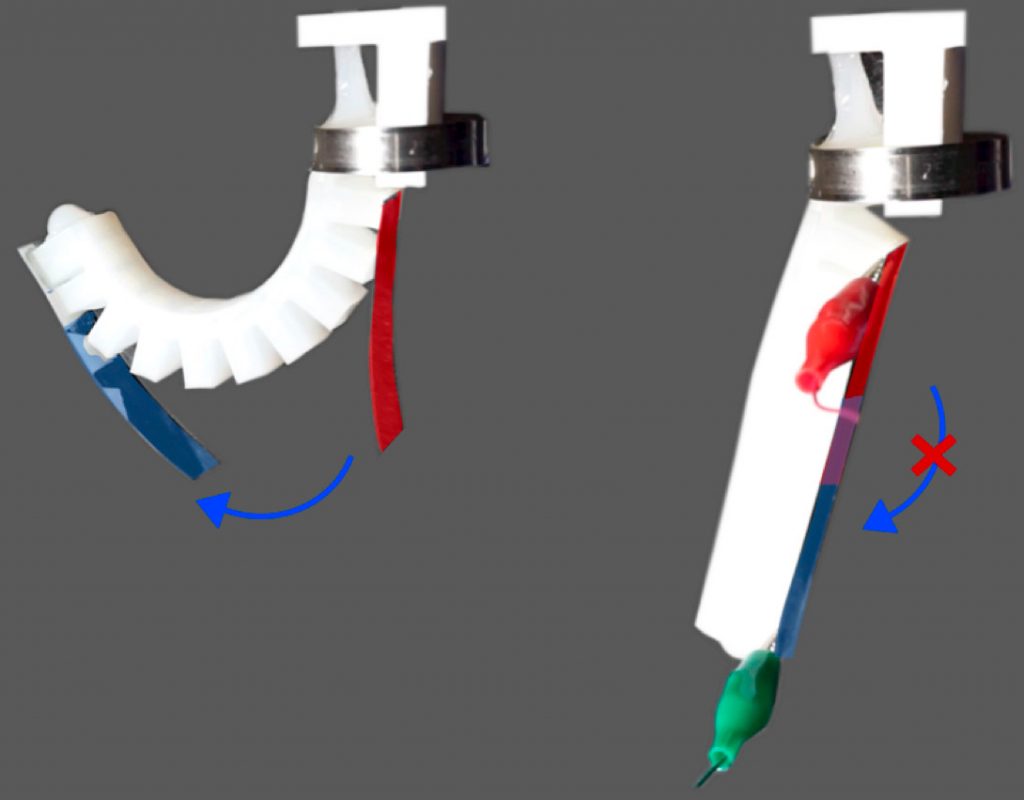
To show the power of their clutch, the workforce connected it to a pneumatic finger. With out the researchers’ clutch, the finger was capable of maintain the burden of 1 apple whereas inflated right into a curled place; with it, the finger might maintain a whole bag of them.
In one other demonstration, the clutch was capable of improve the power of an elbow joint to have the ability to help the burden of a model arm on the low vitality demand of 125 volts.
Future work that the workforce is happy to delve into consists of utilizing this new clutch mannequin to develop wearable augmented and virtual-reality gadgets.
“Conventional clutches require about 300 volts, a degree that may be unsafe for human interplay,” says Levine. “We need to proceed to enhance our clutches, making them smaller, lighter and fewer energetically pricey to deliver these merchandise to the actual world. Ultimately, these clutches may very well be utilized in wearable gloves that simulate object manipulation in a VR setting.”
“Present applied sciences present suggestions via vibrations, however simulating bodily contact with a digital object is restricted with at this time’s gadgets,” says Pikul. “Think about having each the visible simulation and feeling of being in one other setting. VR and AR may very well be utilized in coaching, distant working, or simply simulating contact and motion for individuals who lack these experiences in the actual world. This know-how will get us nearer to these prospects.”
Enhancing human-robot interactions is among the essential targets of Pikul’s lab and the direct advantages that this analysis presents is gas for their very own analysis passions.
“We haven’t seen many comfortable robots in our world but, and that’s, partially, as a consequence of their lack of power, however now now we have one answer to that problem,” says Levine. “This new technique to design clutches may result in purposes of soppy robots that we can’t think about proper now. I need to create robots that assist folks, make folks really feel good, and improve the human expertise, and this work is getting us nearer to that aim. I’m actually excited to see the place we go subsequent.”
![]()
![]()
Penn Engineering At present

{kind=link}