

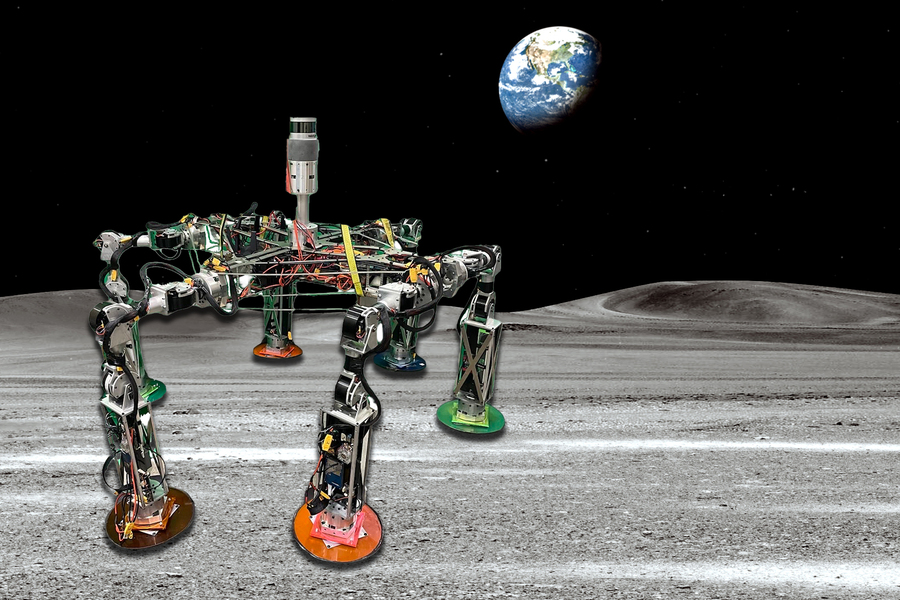
A crew of MIT engineers is designing a equipment of common robotic components that an astronaut might simply combine and match to construct completely different robotic “species” to suit varied missions on the moon. Credit score: hexapod picture courtesy of the researchers, edited by MIT Information
By Jennifer Chu | MIT Information Workplace
When astronauts start to construct a everlasting base on the moon, as NASA plans to do within the coming years, they’ll need assistance. Robots might doubtlessly do the heavy lifting by laying cables, deploying photo voltaic panels, erecting communications towers, and constructing habitats. But when every robotic is designed for a particular motion or job, a moon base might grow to be overrun by a zoo of machines, every with its personal distinctive components and protocols.
To keep away from a bottleneck of bots, a crew of MIT engineers is designing a equipment of common robotic components that an astronaut might simply combine and match to quickly configure completely different robotic “species” to suit varied missions on the moon. As soon as a mission is accomplished, a robotic might be disassembled and its components used to configure a brand new robotic to satisfy a unique job.
The crew calls the system WORMS, for the Strolling Oligomeric Robotic Mobility System. The system’s components embrace worm-inspired robotic limbs that an astronaut can simply snap onto a base, and that work collectively as a strolling robotic. Relying on the mission, components might be configured to construct, as an example, massive “pack” bots able to carrying heavy photo voltaic panels up a hill. The identical components may very well be reconfigured into six-legged spider bots that may be lowered right into a lava tube to drill for frozen water.
“You might think about a shed on the moon with cabinets of worms,” says crew chief George Lordos, a PhD candidate and graduate teacher in MIT’s Division of Aeronautics and Astronautics (AeroAstro), in reference to the unbiased, articulated robots that carry their very own motors, sensors, laptop, and battery. “Astronauts might go into the shed, choose the worms they want, together with the precise footwear, physique, sensors and instruments, and so they might snap all the things collectively, then disassemble it to make a brand new one. The design is versatile, sustainable, and cost-effective.”
Lordos’ crew has constructed and demonstrated a six-legged WORMS robotic. Final week, they offered their outcomes at IEEE’s Aerospace Convention, the place additionally they acquired the convention’s Greatest Paper Award.
MIT crew members embrace Michael J. Brown, Kir Latyshev, Aileen Liao, Sharmi Shah, Cesar Meza, Brooke Bensche, Cynthia Cao, Yang Chen, Alex S. Miller, Aditya Mehrotra, Jacob Rodriguez, Anna Mokkapati, Tomas Cantu, Katherina Sapozhnikov, Jessica Rutledge, David Trumper, Sangbae Kim, Olivier de Weck, Jeffrey Hoffman, together with Aleks Siemenn, Cormac O’Neill, Diego Rivero, Fiona Lin, Hanfei Cui, Isabella Golemme, John Zhang, Jolie Bercow, Prajwal Mahesh, Stephanie Howe, and Zeyad Al Awwad, in addition to Chiara Rissola of Carnegie Mellon College and Wendell Chun of the College of Denver.
Natural instincts
WORMS was conceived in 2022 as a solution to NASA’s Breakthrough, Modern and Recreation-changing (BIG) Concept Problem — an annual competitors for college college students to design, develop, and reveal a game-changing thought. In 2022, NASA challenged college students to develop robotic programs that may transfer throughout excessive terrain, with out the usage of wheels.
A crew from MIT’s House Sources Workshop took up the problem, aiming particularly for a lunar robotic design that might navigate the acute terrain of the moon’s South Pole — a panorama that’s marked by thick, fluffy mud; steep, rocky slopes; and deep lava tubes. The atmosphere additionally hosts “completely shadowed” areas that might comprise frozen water, which, if accessible, could be important for sustaining astronauts.
As they mulled over methods to navigate the moon’s polar terrain, the scholars took inspiration from animals. Of their preliminary brainstorming, they famous sure animals might conceptually be suited to sure missions: A spider might drop down and discover a lava tube, a line of elephants might carry heavy gear whereas supporting one another down a steep slope, and a goat, tethered to an ox, might assist lead the bigger animal up the facet of a hill because it transports an array of photo voltaic panels.
“As we had been considering of those animal inspirations, we realized that one of many easiest animals, the worm, makes related actions as an arm, or a leg, or a spine, or a tail,” says deputy crew chief and AeroAstro graduate pupil Michael Brown. “After which the lightbulb went off: We might construct all these animal-inspired robots utilizing worm-like appendages.’”

The analysis crew in Killian Courtroom at MIT. Credit score: Courtesy of the researchers
Snap on, snap off
Lordos, who’s of Greek descent, helped coin WORMS, and selected the letter “O” to face for “oligomeric,” which in Greek signifies “a number of components.”
“Our thought was that, with only a few components, mixed in several methods, you would combine and match and get all these completely different robots,” says AeroAstro undergraduate Brooke Bensche.
The system’s important components embrace the appendage, or worm, which might be hooked up to a physique, or chassis, through a “common interface block” that snaps the 2 components collectively by a twist-and-lock mechanism. The components might be disconnected with a small software that releases the block’s spring-loaded pins.
Appendages and our bodies also can snap into equipment reminiscent of a “shoe,” which the crew engineered within the form of a wok, and a LiDAR system that may map the environment to assist a robotic navigate.
“In future iterations we hope so as to add extra snap-on sensors and instruments, reminiscent of winches, stability sensors, and drills,” says AeroAstro undergraduate Jacob Rodriguez.
The crew developed software program that may be tailor-made to coordinate a number of appendages. As a proof of idea, the crew constructed a six-legged robotic in regards to the dimension of a go-cart. Within the lab, they confirmed that when assembled, the robotic’s unbiased limbs labored to stroll over stage floor. The crew additionally confirmed that they might shortly assemble and disassemble the robotic within the subject, on a desert web site in California.
In its first era, every WORMS appendage measures about 1 meter lengthy and weighs about 20 kilos. Within the moon’s gravity, which is about one-sixth that of Earth’s, every limb would weigh about 3 kilos, which an astronaut might simply deal with to construct or disassemble a robotic within the subject. The crew has deliberate out the specs for a bigger era with longer and barely heavier appendages. These greater components may very well be snapped collectively to construct “pack” bots, able to transporting heavy payloads.
“There are a lot of buzz phrases which can be used to explain efficient programs for future area exploration: modular, reconfigurable, adaptable, versatile, cross-cutting, et cetera,” says Kevin Kempton, an engineer at NASA’s Langley Analysis Middle, who served as a decide for the 2022 BIG Concept Problem. “The MIT WORMS idea incorporates all these qualities and extra.”
This analysis was supported, partially, by NASA, MIT, the Massachusetts House Grant, the Nationwide Science Basis, and the Fannie and John Hertz Basis.

MIT Information

{kind=link}