

Nov 18, 2022
(Nanowerk Information) Impressed by the biomechanics of the manta ray, researchers at North Carolina State College have developed an energy-efficient tender robotic that may swim greater than 4 occasions sooner than earlier swimming tender robots. The robots are referred to as “butterfly bots,” as a result of their swimming movement resembles the way in which an individual’s arms transfer when they’re swimming the butterfly stroke.
“Up to now, swimming tender robots haven’t been capable of swim sooner than one physique size per second, however marine animals – resembling manta rays – are capable of swim a lot sooner, and far more effectively,” says Jie Yin, corresponding creator of a paper on the work and an affiliate professor of mechanical and aerospace engineering at NC State. “We needed to attract on the biomechanics of those animals to see if we might develop sooner, extra energy-efficient tender robots. The prototypes we’ve developed work exceptionally effectively.”
The researchers developed two forms of butterfly bots. One was constructed particularly for velocity, and was capable of attain common speeds of three.74 physique lengths per second. A second was designed to be extremely maneuverable, able to making sharp turns to the precise or left. This maneuverable prototype was capable of attain speeds of 1.7 physique lengths per second.
 Impressed by the biomechanics of the manta ray, researchers at North Carolina State College have developed an energy-efficient tender robotic that may swim greater than 4 occasions sooner than earlier swimming tender robots. The robots are referred to as “butterfly bots,” as a result of their swimming movement resembles the way in which an individual’s arms transfer when they’re swimming the butterfly stroke. (Picture: Jie Yin, NC State College)
“Researchers who research aerodynamics and biomechanics use one thing referred to as a Strouhal quantity to evaluate the power effectivity of flying and swimming animals,” says Yinding Chi, first creator of the paper (“Snapping for high-speed and high-efficient, butterfly stroke-like tender swimmer”) and a latest Ph.D. graduate of NC State. “Peak propulsive effectivity happens when an animal swims or flies with a Strouhal variety of between 0.2 and 0.4. Each of our butterfly bots had Strouhal numbers on this vary.”
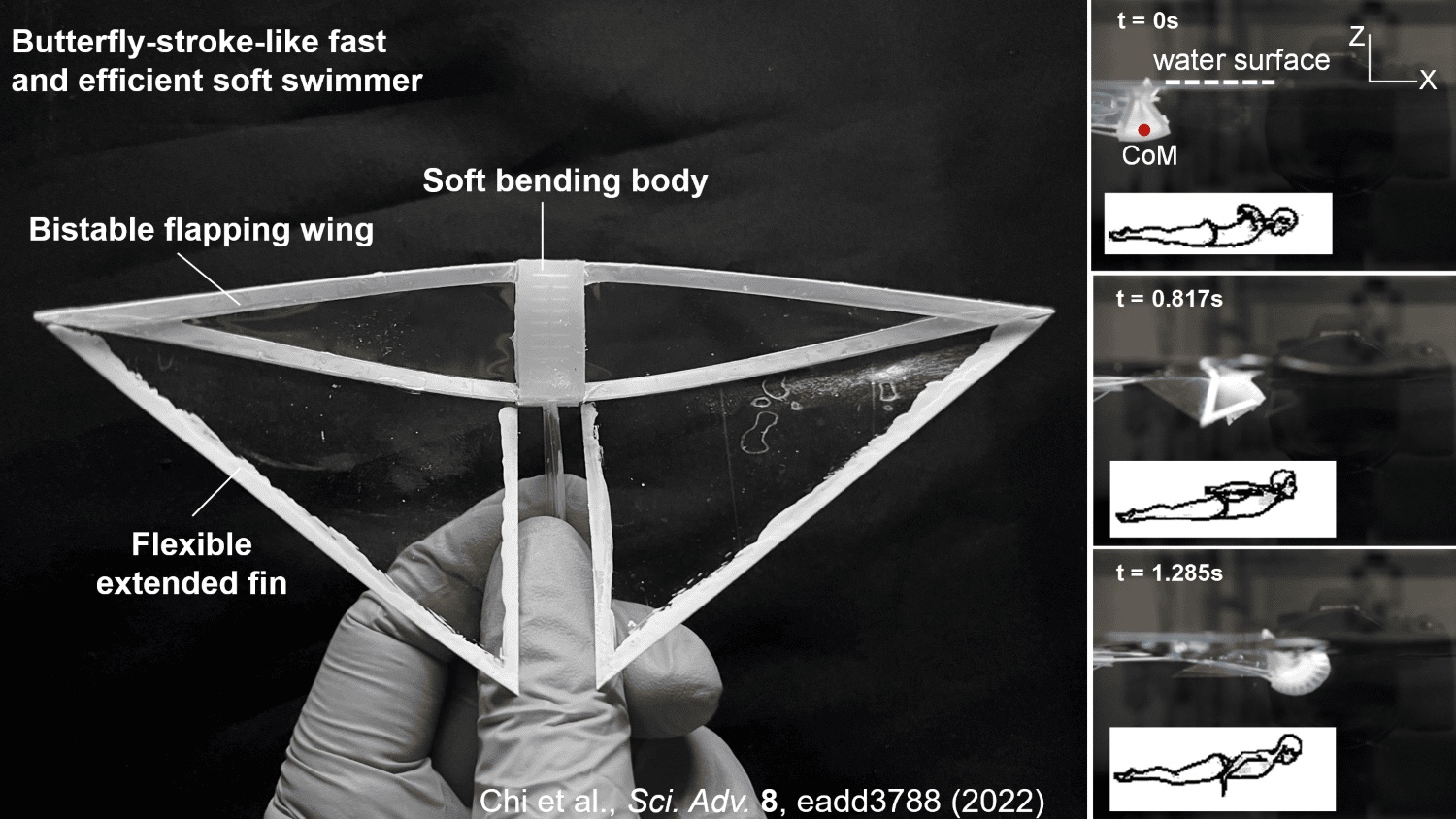
The butterfly bots derive their swimming energy from their wings, that are “bistable,” that means the wings have two secure states. The wing is just like a snap hair clip. A hair clip is secure till you apply a specific amount of power (by bending it). When the quantity of power reaches important level, the hair clip snaps into a distinct form – which can be secure.
Within the butterfly bots, the hair clip-inspired bistable wings are hooked up to a tender, silicone physique. Customers management the swap between the 2 secure states within the wings by pumping air into chambers contained in the tender physique. As these chambers inflate and deflate, the physique bends up and down – forcing the wings to snap backwards and forwards with it.
“Most earlier makes an attempt to develop flapping robots have centered on utilizing motors to supply energy on to the wings,” Yin says. “Our method makes use of bistable wings which are passively pushed by transferring the central physique. This is a crucial distinction, as a result of it permits for a simplified design, which lowers the burden.”
The sooner butterfly bot has just one “drive unit” – the tender physique – which controls each of its wings. This makes it very quick, however troublesome to show left or proper. The maneuverable butterfly bot primarily has two drive items, that are related aspect by aspect. This design permits customers to govern the wings on each side, or to “flap” just one wing, which is what permits it to make sharp turns.
“This work is an thrilling proof of idea, but it surely has limitations,” Yin says. “Most clearly, the present prototypes are tethered by slender tubing, which is what we use to pump air into the central our bodies. We’re presently working to develop an untethered, autonomous model.”
Impressed by the biomechanics of the manta ray, researchers at North Carolina State College have developed an energy-efficient tender robotic that may swim greater than 4 occasions sooner than earlier swimming tender robots. The robots are referred to as “butterfly bots,” as a result of their swimming movement resembles the way in which an individual’s arms transfer when they’re swimming the butterfly stroke. (Picture: Jie Yin, NC State College)
“Researchers who research aerodynamics and biomechanics use one thing referred to as a Strouhal quantity to evaluate the power effectivity of flying and swimming animals,” says Yinding Chi, first creator of the paper (“Snapping for high-speed and high-efficient, butterfly stroke-like tender swimmer”) and a latest Ph.D. graduate of NC State. “Peak propulsive effectivity happens when an animal swims or flies with a Strouhal variety of between 0.2 and 0.4. Each of our butterfly bots had Strouhal numbers on this vary.”
The butterfly bots derive their swimming energy from their wings, that are “bistable,” that means the wings have two secure states. The wing is just like a snap hair clip. A hair clip is secure till you apply a specific amount of power (by bending it). When the quantity of power reaches important level, the hair clip snaps into a distinct form – which can be secure.
Within the butterfly bots, the hair clip-inspired bistable wings are hooked up to a tender, silicone physique. Customers management the swap between the 2 secure states within the wings by pumping air into chambers contained in the tender physique. As these chambers inflate and deflate, the physique bends up and down – forcing the wings to snap backwards and forwards with it.
“Most earlier makes an attempt to develop flapping robots have centered on utilizing motors to supply energy on to the wings,” Yin says. “Our method makes use of bistable wings which are passively pushed by transferring the central physique. This is a crucial distinction, as a result of it permits for a simplified design, which lowers the burden.”
The sooner butterfly bot has just one “drive unit” – the tender physique – which controls each of its wings. This makes it very quick, however troublesome to show left or proper. The maneuverable butterfly bot primarily has two drive items, that are related aspect by aspect. This design permits customers to govern the wings on each side, or to “flap” just one wing, which is what permits it to make sharp turns.
“This work is an thrilling proof of idea, but it surely has limitations,” Yin says. “Most clearly, the present prototypes are tethered by slender tubing, which is what we use to pump air into the central our bodies. We’re presently working to develop an untethered, autonomous model.”
Impressed by the biomechanics of the manta ray, researchers at North Carolina State College have developed an energy-efficient tender robotic that may swim greater than 4 occasions sooner than earlier swimming tender robots. The robots are referred to as “butterfly bots,” as a result of their swimming movement resembles the way in which an individual’s arms transfer when they’re swimming the butterfly stroke. (Picture: Jie Yin, NC State College)
“Researchers who research aerodynamics and biomechanics use one thing referred to as a Strouhal quantity to evaluate the power effectivity of flying and swimming animals,” says Yinding Chi, first creator of the paper (“Snapping for high-speed and high-efficient, butterfly stroke-like tender swimmer”) and a latest Ph.D. graduate of NC State. “Peak propulsive effectivity happens when an animal swims or flies with a Strouhal variety of between 0.2 and 0.4. Each of our butterfly bots had Strouhal numbers on this vary.”
The butterfly bots derive their swimming energy from their wings, that are “bistable,” that means the wings have two secure states. The wing is just like a snap hair clip. A hair clip is secure till you apply a specific amount of power (by bending it). When the quantity of power reaches important level, the hair clip snaps into a distinct form – which can be secure.
Within the butterfly bots, the hair clip-inspired bistable wings are hooked up to a tender, silicone physique. Customers management the swap between the 2 secure states within the wings by pumping air into chambers contained in the tender physique. As these chambers inflate and deflate, the physique bends up and down – forcing the wings to snap backwards and forwards with it.
“Most earlier makes an attempt to develop flapping robots have centered on utilizing motors to supply energy on to the wings,” Yin says. “Our method makes use of bistable wings which are passively pushed by transferring the central physique. This is a crucial distinction, as a result of it permits for a simplified design, which lowers the burden.”
The sooner butterfly bot has just one “drive unit” – the tender physique – which controls each of its wings. This makes it very quick, however troublesome to show left or proper. The maneuverable butterfly bot primarily has two drive items, that are related aspect by aspect. This design permits customers to govern the wings on each side, or to “flap” just one wing, which is what permits it to make sharp turns.
“This work is an thrilling proof of idea, but it surely has limitations,” Yin says. “Most clearly, the present prototypes are tethered by slender tubing, which is what we use to pump air into the central our bodies. We’re presently working to develop an untethered, autonomous model.”

{kind=link}