| Dec 22, 2023 |
|
|
|
(Nanowerk Information) A analysis staff led by Analysis Director Hyuneui Lim of the Nano-Convergence Manufacturing Methods Analysis Division and Precept Researcher Youngdo Jung of the Division of Nature-Impressed System and Utility of the Korea Institute of Equipment and Supplies (KIMM), developed a real-time and multimodal tactile notion system able to offering multi-tactile data in actual time impressed by human tactile notion, and introduced the result of the analysis within the journal Gentle Robotics (“Human-Impressed Tactile Notion System for Actual-Time and Multimodal Detection of Tactile Stimuli”).
|
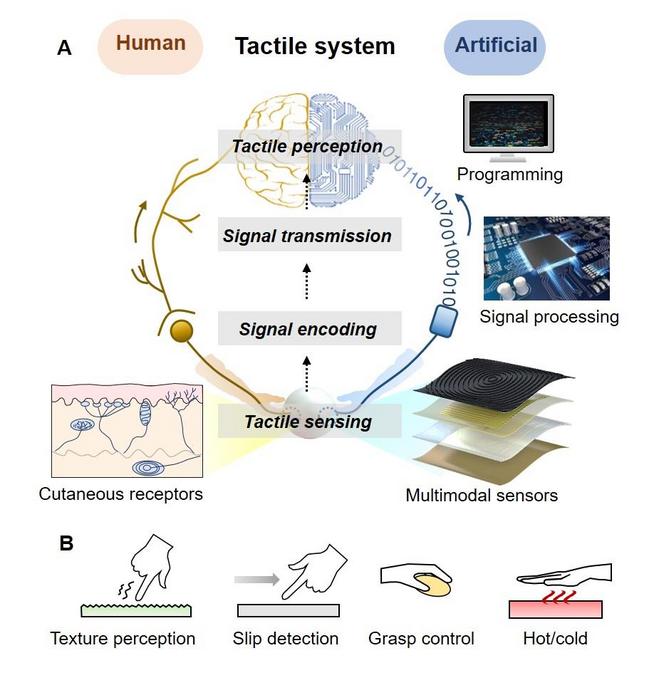 |
| Schematics of the tactile methods. (A) Schematics of the human and synthetic tactile methods. (B) Examples of the capabilities of tactile methods. (Picture: KIMM)
|
|
The analysis staff developed a real-time and multimodal tactile detection system, by mimicking the precept by which varied kinds of tactile data is perceived by a wide range of sensory receptors within the human pores and skin and is transmitted to the mind in actual time. This technique consists of 4 three-dimensionally stacked tactile sensors, a sign processing/transmission module, and an evaluation module. The system has efficiently distinguished varied kinds of tactile stimuli and floor textures and futhermore differenciated advanced movement in actual time.
|
|
4 kinds of tactile sensors, every of which detects temperature, vibration, shear drive, and vertical strain, are laminated in a three-dimensional construction based mostly on three-dimensional (3D) versatile electrode printing course of know-how. On the identical time, these sensors are related to the FPCB (Versatile Printed Circuit Board) of the digital module for sign processing and transmission, thereby simply transmitting signal-processed tactile data via the corresponding FPCB connection terminal.
|
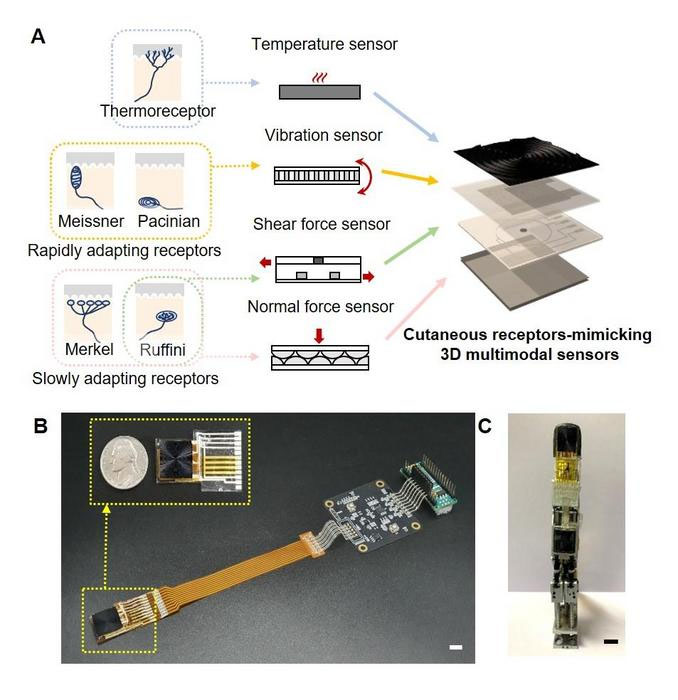 |
| Cutaneous receptors-mimicking sensors. (A) Schematics of the cutaneous receptors and proposed multimodal sensors. (B) Pictures of the 3D built-in sensors related to the versatile 3D interconnection system. (C) {Photograph} of the 3D built-in sensors mounted on a robotic finger. The dimensions bars present 1 cm. (Picture: KIMM)
|
|
In earlier research, advanced exterior measuring units and evaluation tools had been wanted with a view to detect the indicators generated from the corresponding gadget in order that varied types of tactile stimuli could possibly be detected. Due to this fact, it was tough to use these units to wearable units or robots within the type of a easy stand-alone system.
|
|
Then again, within the newly developed multimodal tactile notion system, a number of kinds of tactile sensors are organized vertically in a three-dimensional construction. Moreover, a module able to changing, transmitting, and analyzing the indicators has additionally been developed, which permits for the system to be applied in a compact and easy kind and makes it relevant to precise robots and wearable units.
|
|
Analysis Director Hyuneui Lim of the KIMM was quoted as saying, “By mimicking the sensory system of people, the real-time multimodal tactile notion system is able to perceiving a number of senses concurrently. Furthermore, it’s a know-how that has solved the issues which may be attributable to advanced and huge sign processing and detection methods when utilizing typical sensors.” SHe added, “By making use of this method to robots or wearable units, we can get hold of a big quantity of various and sophisticated tactile sign data, which can hopefully contribute to the advance of public welfare and safety.”
|



{kind=link}