
Sooner or later, we think about that groups of robots will discover and develop the floor of close by planets, moons and asteroids – taking samples, constructing constructions, deploying devices. Lots of of brilliant analysis minds are busy designing such robots. We’re excited by one other query: the best way to present the astronauts the instruments to effectively function their robotic groups on the planetary floor, in a approach that doesn’t frustrate or exhaust them?
Acquired knowledge says that extra automation is all the time higher. In any case, with automation, the job often will get achieved quicker, and the extra duties (or sub-tasks) robots can do on their very own, the much less the workload on the operator. Think about a robotic constructing a construction or organising a telescope array, planning and executing duties by itself, just like a “manufacturing unit of the longer term”, with solely sporadic enter from an astronaut supervisor orbiting in a spaceship. That is one thing we examined within the ISS experiment SUPVIS Justin in 2017-18, with astronauts on board the ISS commanding DLR Robotic and Mechatronic Heart’s humanoid robotic, Rollin’ Justin, in Supervised Autonomy.
Nevertheless, the unstructured surroundings and harsh lighting on planetary surfaces makes issues troublesome for even the very best object-detection algorithms. And what occurs when issues go improper, or a job must be achieved that was not foreseen by the robotic programmers? In a manufacturing unit on Earth, the supervisor would possibly go right down to the store flooring to set issues proper – an costly and harmful journey if you’re an astronaut!
The subsequent smartest thing is to function the robotic as an avatar of your self on the planet floor – seeing what it sees, feeling what it feels. Immersing your self within the robotic’s surroundings, you possibly can command the robotic to do precisely what you need – topic to its bodily capabilities.
Area Experiments

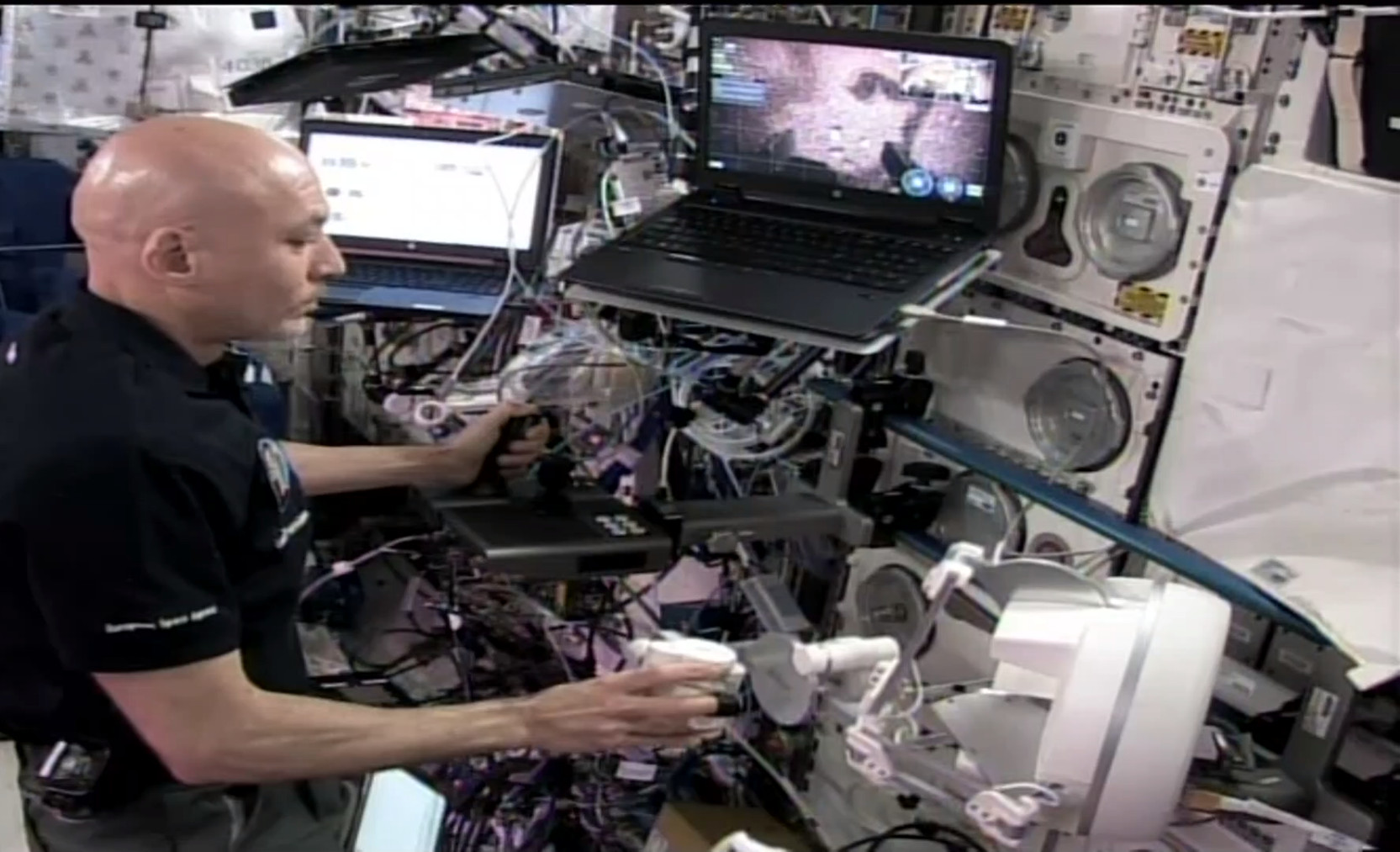
In 2019, we examined this in our subsequent ISS experiment, ANALOG-1, with the Work together Rover from ESA’s Human Robotic Interplay Lab. That is an all-wheel-drive platform with two robotic arms, each geared up with cameras and one fitted with a gripper and force-torque sensor, in addition to quite a few different sensors.
On a laptop computer display on the ISS, the astronaut – Luca Parmitano – noticed the views from the robotic’s cameras, and will transfer one digicam and drive the platform with a custom-built joystick. The manipulator arm was managed with the sigma.7 force-feedback gadget: the astronaut strapped his hand to it, and will transfer the robotic arm and open its gripper by transferring and opening his personal hand. He might additionally really feel the forces from touching the bottom or the rock samples – essential to assist him perceive the state of affairs, because the low bandwidth to the ISS restricted the standard of the video feed.
There have been different challenges. Over such massive distances, delays of as much as a second are typical, which imply that conventional teleoperation with force-feedback might need turn out to be unstable. Moreover, the time delay the robotic between making contact with the surroundings and the astronaut feeling it could result in harmful motions which may harm the robotic.
To assist with this we developed a management technique: the Time Area Passivity Method for Excessive Delays (TDPA-HD). It screens the quantity of vitality that the operator places in (i.e. pressure multiplied by velocity built-in over time), and sends that worth together with the rate command. On the robotic facet, it measures the pressure that the robotic is exerting, and reduces the rate in order that it doesn’t switch extra vitality to the surroundings than the operator put in.
On the human’s facet, it reduces the force-feedback to the operator in order that no extra vitality is transferred to the operator than is measured from the surroundings. Because of this the system stays steady, but additionally that the operator by no means by chance instructions the robotic to exert extra pressure on the surroundings than they intend to – preserving each operator and robotic protected.
This was the primary time that an astronaut had teleoperated a robotic from area whereas feeling force-feedback in all six levels of freedom (three rotational, three translational). The astronaut did all of the sampling duties assigned to him – whereas we might collect precious knowledge to validate our technique, and publish it in Science Robotics. We additionally reported our findings on the astronaut’s expertise.
Some issues had been nonetheless missing. The experiment was carried out in a hangar on an previous Dutch air base – probably not consultant of a planet floor.
Additionally, the astronaut requested if the robotic might do extra by itself – in distinction to SUPVIS Justin, when the astronauts typically discovered the Supervised Autonomy interface limiting and wished for extra immersion. What if the operator might select the extent of robotic autonomy acceptable to the duty?
Scalable Autonomy
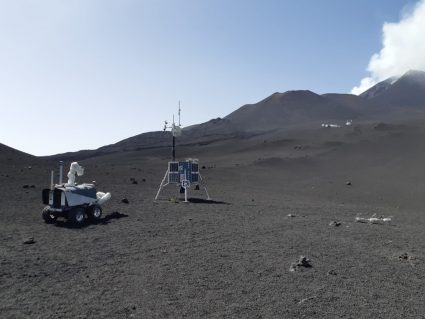
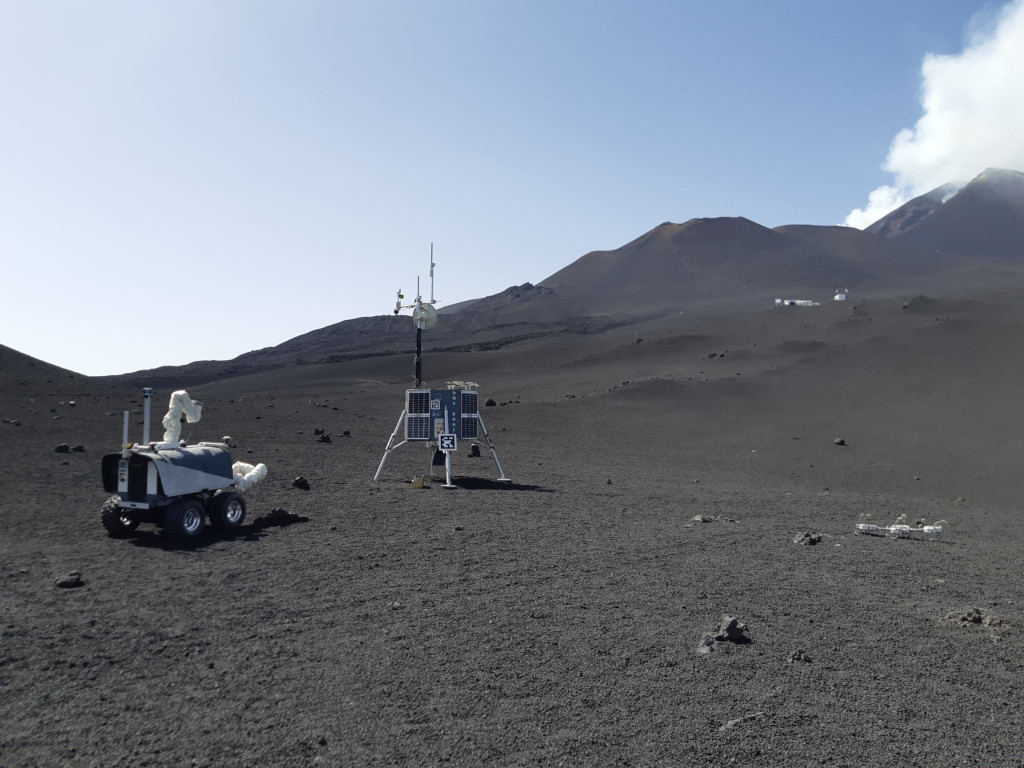
In June and July 2022, we joined the DLR’s ARCHES experiment marketing campaign on Mt. Etna. The robotic – on a lava area 2,700 metres above sea degree – was managed by former astronaut Thomas Reiter from the management room within the close by city of Catania. Trying by the robotic’s cameras, it wasn’t a fantastic leap of the creativeness to think about your self on one other planet – save for the occasional bumblebee or group of vacationers.

This was our first enterprise into “Scalable Autonomy” – permitting the astronaut to scale up or down the robotic’s autonomy, in line with the duty. In 2019, Luca might solely see by the robotic’s cameras and drive with a joystick, this time Thomas Reiter had an interactive map, on which he might place markers for the robotic to routinely drive to. In 2019, the astronaut might management the robotic arm with pressure suggestions; he might now additionally routinely detect and accumulate rocks with assist from a Masks R-CNN (region-based convolutional neural community).
We realized so much from testing our system in a practical surroundings. Not least, that the idea that extra automation means a decrease astronaut workload shouldn’t be all the time true. Whereas the astronaut used the automated rock-picking so much, he warmed much less to the automated navigation – indicating that it was extra effort than driving with the joystick. We suspect that much more elements come into play, together with how a lot the astronaut trusts the automated system, how effectively it really works, and the suggestions that the astronaut will get from it on display – to not point out the delay. The longer the delay, the tougher it’s to create an immersive expertise (consider on-line video video games with numerous lag) and due to this fact the extra enticing autonomy turns into.
What are the following steps? We wish to check a very scalable-autonomy, multi-robot situation. We’re working in direction of this within the undertaking Floor Avatar – in a large-scale Mars-analog surroundings, astronauts on the ISS will command a crew of 4 robots on floor. After two preliminary exams with astronauts Samantha Christoforetti and Jessica Watkins in 2022, the primary huge experiment is deliberate for 2023.
Right here the technical challenges are totally different. Past the formidable engineering problem of getting 4 robots to work along with a shared understanding of their world, we additionally need to try to predict which duties can be simpler for the astronaut with which degree of autonomy, when and the way she might scale the autonomy up or down, and the best way to combine this all into one, intuitive consumer interface.
The insights we hope to realize from this could be helpful not just for area exploration, however for any operator commanding a crew of robots at a distance – for upkeep of photo voltaic or wind vitality parks, for instance, or search and rescue missions. An area experiment of this kind and scale will probably be our most complicated ISS telerobotic mission but – however we’re wanting ahead to this thrilling problem forward.
tags: c-Area
Aaron Pereira
is a researcher on the German Aerospace Centre (DLR) and a visitor researcher at ESA’s Human Robotic Interplay Lab.
Aaron Pereira
is a researcher on the German Aerospace Centre (DLR) and a visitor researcher at ESA’s Human Robotic Interplay Lab.

Neal Y. Lii
is the area head of Area Robotic Help, and the co-founding head of the Modular Dexterous (Modex) Robotics Laboratory on the German Aerospace Heart (DLR).
Neal Y. Lii
is the area head of Area Robotic Help, and the co-founding head of the Modular Dexterous (Modex) Robotics Laboratory on the German Aerospace Heart (DLR).

Thomas Krueger
is head of the Human Robotic Interplay Lab at ESA.

{kind=link}