
The developments in robotics have opened doorways for machines with autonomous locomotion talents. 4-legged quadrupled robots, being able to maneuver freely, signify a paradigm leap in know-how. Quadrupled robots are versatile machines that may maneuver round obstacles and traverse uneven terrain. They are often utilized in discipline duties akin to inspection of hazardous areas or in search and rescue operations.
Quadrupled robots have skilled excessive demand in recent times attributable to their distinctive stability, balancing, and coordination in complicated terrains. Their excessive demand has made the position of CNC know-how pivotal in its manufacturing, which might assure accuracy for complicated CNC elements.
Design Problem for Quadrupled Robotic
Within the discipline of robotics, the event of quadrupedal units is a results of the fusion of refined engineering and natural design. To design and manufacture these robots a grasp of biomechanics is required to duplicate the difficult interactions between muscle tissues, tendons, and bones present in animals. Changing these organic wonders into mechanical equivalents whereas sustaining easy operation is the tough half.
1. The Complexity of Quadruped Robotic Locomotion
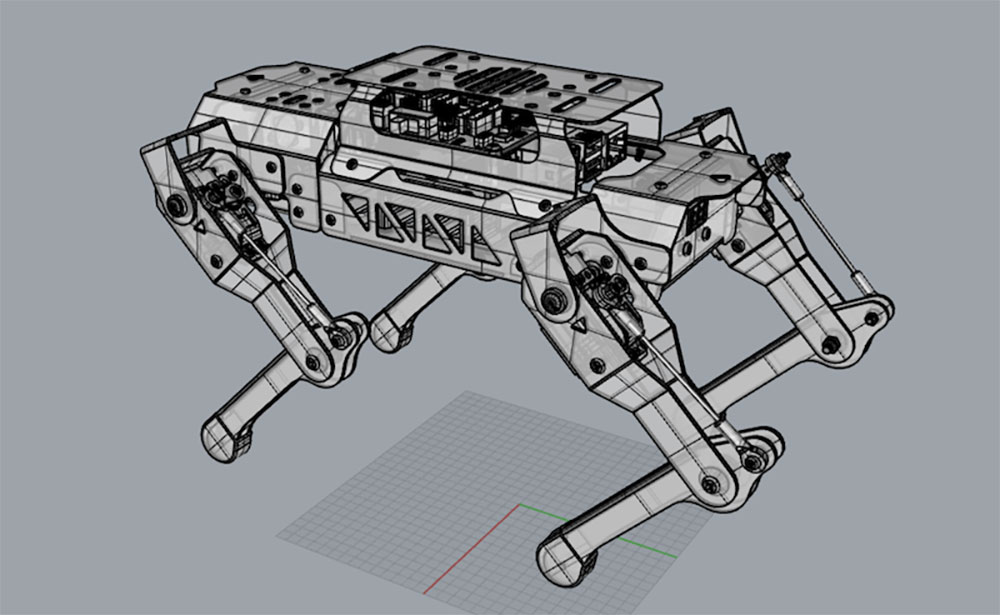
Quadruped robots exhibit numerous gaits (sequences of leg actions), together with trotting, strolling, galloping, and crawling. The leg of the robotic includes a number of levels of freedom interconnected with numerous chains of joints such because the hip, knee, and ankle. Dynamic modeling of the leg construction performs a key position in reaching stability on numerous terrains. The robotic’s movement is managed by actuators that may be both excessive torque electrical motors or pneumatic management programs. These programs drive the limbs which are supported by refined transmission mechanisms for efficient movement.
The management system for the robotic may be categorised into kinematic and dynamic management programs. Kinematic management programs calculate joint angles for fascinating leg positions and high-level instructions into particular limb actions. This permits the robotic to stroll, run, and climb as per the given command.
The dynamic management system is accountable for controlling robotic motion in real-time by adjusting the leg trajectories and joint torques. These algorithms help the gait patterns, step lengths, and leg placements for attaining stability and effectivity throughout actions.
2. Select Light-weight Sturdy Materials
The fabric choice for the quadruped robots may be essential within the manufacturing course of. The outer overlaying and chassis of the robots are manufactured from carbon-reinforced composites with the addition of aramid fibers and epoxy matrices.

Aluminum alloy is a standard characteristic of the mechanical system of the robotic. 7000-series aluminum akin to 7075 or 6061 aluminum can be utilized for its excessive energy, low density, and good machinability. For the leg hyperlinks of the robotic, carbon fiber-reinforced polymers (CFRP) or Glass fiber-reinforced polymers (GFRP) are used which give particular energy and stiffness.
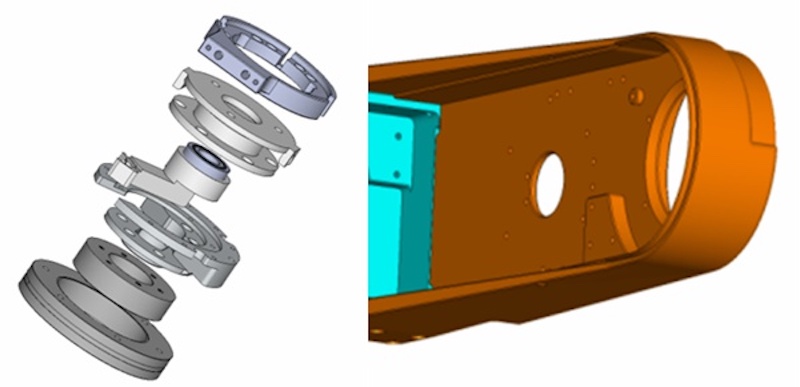
The joint mechanism incorporates aerospace-grade aluminum alloys akin to 7075-T6 or titanium alloys akin to Ti-6AI-4V. Hardened alloys akin to metal (4340 or 4140 metal) can used for the transmission elements to endure excessive torque and abrasive put on.
Customized Machining of Quadruped Robotic Elements
The machining course of for the quadruped robots consists of numerous precision methods akin to CNC Milling, Electrical Discharge Machining (EDM) and grinding. CNC methods are used for manufacturing robotic elements akin to leg hyperlinks and chassis elements from aluminum alloys and different composites. Turning operations can be utilized for cylindrical and spherical elements akin to shafts and actuators and require constant instrument alignments and feed charges. EDM may be utilized for classy elements the place the lack of materials isn’t fascinating, and precision is required.
Customization may be carried out within the machining course of with using detailed CAD fashions that are translated into toolpath directions via CAM software program. The machining parameters akin to chopping speeds, feeds and power geometries are optimized primarily based on the used supplies’ traits with precision. For complicated patterns directions are offered to make sure instrument actions in a number of axes whereas the CNC milling course of ensures utmost precision.

Floor Ending of the Quadrupled Robotic Elements
After the machining course of has been accomplished, the subsequent step is the floor ending. Anodizing and powder coating are used to guard the robotic’s floor from sporting out. Anodizing includes the electrochemical conversion of the floor layer into an oxidizing coating which boosts floor harness and improves the corrosion resistance capacity.
Powder coating of the floor of quadruped robots includes electrostatically making use of dry powder which is then adopted by a curing course of. It improves the surfaces’ resistance to abrasion and chemical substances.
CNC-enabled floor ending methods akin to electrochemical sharpening and laser ablation fortify the floor for sturdiness and tune it to optimize efficiency throughout its missions. Electrochemical sharpening can assist enhance the floor irregularities via a managed electrochemical dissolution leading to a easy floor.
Laser ablations use high-energy laser beams that take away further floor layers enhancing floor texture and hardness guaranteeing sturdiness in essential efficiency in robotic missions.
Quadrupled Robots in Search and Rescue Missions
With their adaptability to harsh environments, the Quadrupled robots may be utilized in search and rescue missions. They will navigate with ease in particles and uneven terrain, detecting survivors and growing possibilities of profitable rescues.
They’re succesful with high-end cameras and sensors with superior thermal imaging capabilities which can assist sense the atmosphere and terrains throughout the missions. Quadruped robots use LiDAR (Gentle Detection and Ranging) methods for precision mapping of environment and impediment detection. Using sensor modalities within the robots using environmental evaluation is essential for knowledgeable decision-making and acquiring essential knowledge in rescue missions.
Quadrupled robots are additionally outfitted with real-time communication and knowledge transmission functionality. This helps the rescuers to obtain vital discipline knowledge and data whereas coordinating throughout the mission successfully. Using these robots reduces the response time of search and rescue missions which may be lifesaving, conserving in view the vital nature of those missions.
Conclusion
The quadrupled robots are a modern-day innovation that has the ability to enhance human expertise and machining know-how. These robots having distinctive traits akin to excellent mobility, flexibility, and adaptableness can be utilized in a variety of fields akin to autonomous deliveries, search and rescue missions, and industrial inspections.
The important perform of CNC machining is on the middle of this technological surprise. The fusion of CNC know-how with the manufacturing and design course of of those robots exemplifies scientific innovation. This sort of exact manufacturing is the cornerstone for creating elements which are important to the effectivity and operation of quadruped robots.
The submit Design and Manufacturing of Quadruped Robotic Elements appeared first on Datafloq.

{kind=link}