
In a way, picture segmentation will not be that completely different from picture classification. It’s simply that as an alternative of categorizing a picture as an entire, segmentation ends in a label for each single pixel. And as in picture classification, the classes of curiosity rely on the duty: Foreground versus background, say; several types of tissue; several types of vegetation; et cetera.
The current put up will not be the primary on this weblog to deal with that subject; and like all prior ones, it makes use of a U-Internet structure to attain its objective. Central traits (of this put up, not U-Internet) are:
-
It demonstrates how you can carry out knowledge augmentation for a picture segmentation job.
-
It makes use of luz,
torch’s high-level interface, to coach the mannequin. -
It JIT-traces the skilled mannequin and saves it for deployment on cell units. (JIT being the acronym generally used for the
torchjust-in-time compiler.) -
It contains proof-of-concept code (although not a dialogue) of the saved mannequin being run on Android.
And if you happen to assume that this in itself will not be thrilling sufficient – our job right here is to search out cats and canines. What might be extra useful than a cell software ensuring you’ll be able to distinguish your cat from the fluffy couch she’s reposing on?

Prepare in R
We begin by getting ready the information.
Pre-processing and knowledge augmentation
As supplied by torchdatasets, the Oxford Pet Dataset comes with three variants of goal knowledge to select from: the general class (cat or canine), the person breed (there are thirty-seven of them), and a pixel-level segmentation with three classes: foreground, boundary, and background. The latter is the default; and it’s precisely the kind of goal we want.
A name to oxford_pet_dataset(root = dir) will set off the preliminary obtain:
# want torch > 0.6.1
# could should run remotes::install_github("mlverse/torch", ref = remotes::github_pull("713")) relying on while you learn this
library(torch)
library(torchvision)
library(torchdatasets)
library(luz)
dir <- "~/.torch-datasets/oxford_pet_dataset"
ds <- oxford_pet_dataset(root = dir)Photos (and corresponding masks) come in numerous sizes. For coaching, nonetheless, we’ll want all of them to be the identical measurement. This may be completed by passing in rework = and target_transform = arguments. However what about knowledge augmentation (principally all the time a helpful measure to take)? Think about we make use of random flipping. An enter picture can be flipped – or not – in line with some chance. But when the picture is flipped, the masks higher had be, as nicely! Enter and goal transformations will not be unbiased, on this case.
An answer is to create a wrapper round oxford_pet_dataset() that lets us “hook into” the .getitem() methodology, like so:
pet_dataset <- torch::dataset(
inherit = oxford_pet_dataset,
initialize = operate(..., measurement, normalize = TRUE, augmentation = NULL) {
self$augmentation <- augmentation
input_transform <- operate(x) {
x <- x %>%
transform_to_tensor() %>%
transform_resize(measurement)
# we'll make use of pre-trained MobileNet v2 as a function extractor
# => normalize with a purpose to match the distribution of pictures it was skilled with
if (isTRUE(normalize)) x <- x %>%
transform_normalize(imply = c(0.485, 0.456, 0.406),
std = c(0.229, 0.224, 0.225))
x
}
target_transform <- operate(x) {
x <- torch_tensor(x, dtype = torch_long())
x <- x[newaxis,..]
# interpolation = 0 makes certain we nonetheless find yourself with integer lessons
x <- transform_resize(x, measurement, interpolation = 0)
}
tremendous$initialize(
...,
rework = input_transform,
target_transform = target_transform
)
},
.getitem = operate(i) {
merchandise <- tremendous$.getitem(i)
if (!is.null(self$augmentation))
self$augmentation(merchandise)
else
record(x = merchandise$x, y = merchandise$y[1,..])
}
)All now we have to do now’s create a customized operate that lets us determine on what augmentation to use to every input-target pair, after which, manually name the respective transformation capabilities.
Right here, we flip, on common, each second picture, and if we do, we flip the masks as nicely. The second transformation – orchestrating random adjustments in brightness, saturation, and distinction – is utilized to the enter picture solely.
We now make use of the wrapper, pet_dataset(), to instantiate the coaching and validation units, and create the respective knowledge loaders.
train_ds <- pet_dataset(root = dir,
cut up = "prepare",
measurement = c(224, 224),
augmentation = augmentation)
valid_ds <- pet_dataset(root = dir,
cut up = "legitimate",
measurement = c(224, 224))
train_dl <- dataloader(train_ds, batch_size = 32, shuffle = TRUE)
valid_dl <- dataloader(valid_ds, batch_size = 32)Mannequin definition
The mannequin implements a basic U-Internet structure, with an encoding stage (the “down” cross), a decoding stage (the “up” cross), and importantly, a “bridge” that passes options preserved from the encoding stage on to corresponding layers within the decoding stage.
Encoder
First, now we have the encoder. It makes use of a pre-trained mannequin (MobileNet v2) as its function extractor.
The encoder splits up MobileNet v2’s function extraction blocks into a number of levels, and applies one stage after the opposite. Respective outcomes are saved in a listing.
encoder <- nn_module(
initialize = operate() {
mannequin <- model_mobilenet_v2(pretrained = TRUE)
self$levels <- nn_module_list(record(
nn_identity(),
mannequin$options[1:2],
mannequin$options[3:4],
mannequin$options[5:7],
mannequin$options[8:14],
mannequin$options[15:18]
))
for (par in self$parameters) {
par$requires_grad_(FALSE)
}
},
ahead = operate(x) {
options <- record()
for (i in 1:size(self$levels)) {
x <- self$levels[[i]](x)
options[[length(features) + 1]] <- x
}
options
}
)Decoder
The decoder is made up of configurable blocks. A block receives two enter tensors: one that’s the results of making use of the earlier decoder block, and one which holds the function map produced within the matching encoder stage. Within the ahead cross, first the previous is upsampled, and handed via a nonlinearity. The intermediate result’s then prepended to the second argument, the channeled-through function map. On the resultant tensor, a convolution is utilized, adopted by one other nonlinearity.
decoder_block <- nn_module(
initialize = operate(in_channels, skip_channels, out_channels) {
self$upsample <- nn_conv_transpose2d(
in_channels = in_channels,
out_channels = out_channels,
kernel_size = 2,
stride = 2
)
self$activation <- nn_relu()
self$conv <- nn_conv2d(
in_channels = out_channels + skip_channels,
out_channels = out_channels,
kernel_size = 3,
padding = "identical"
)
},
ahead = operate(x, skip) {
x <- x %>%
self$upsample() %>%
self$activation()
enter <- torch_cat(record(x, skip), dim = 2)
enter %>%
self$conv() %>%
self$activation()
}
)The decoder itself “simply” instantiates and runs via the blocks:
decoder <- nn_module(
initialize = operate(
decoder_channels = c(256, 128, 64, 32, 16),
encoder_channels = c(16, 24, 32, 96, 320)
) {
encoder_channels <- rev(encoder_channels)
skip_channels <- c(encoder_channels[-1], 3)
in_channels <- c(encoder_channels[1], decoder_channels)
depth <- size(encoder_channels)
self$blocks <- nn_module_list()
for (i in seq_len(depth)) {
self$blocks$append(decoder_block(
in_channels = in_channels[i],
skip_channels = skip_channels[i],
out_channels = decoder_channels[i]
))
}
},
ahead = operate(options) {
options <- rev(options)
x <- options[[1]]
for (i in seq_along(self$blocks)) {
x <- self$blocks[[i]](x, options[[i+1]])
}
x
}
)High-level module
Lastly, the top-level module generates the category rating. In our job, there are three pixel lessons. The score-producing submodule can then simply be a last convolution, producing three channels:
mannequin <- nn_module(
initialize = operate() {
self$encoder <- encoder()
self$decoder <- decoder()
self$output <- nn_sequential(
nn_conv2d(in_channels = 16,
out_channels = 3,
kernel_size = 3,
padding = "identical")
)
},
ahead = operate(x) {
x %>%
self$encoder() %>%
self$decoder() %>%
self$output()
}
)Mannequin coaching and (visible) analysis
With luz, mannequin coaching is a matter of two verbs, setup() and match(). The educational price has been decided, for this particular case, utilizing luz::lr_finder(); you’ll possible have to alter it when experimenting with completely different types of knowledge augmentation (and completely different knowledge units).
mannequin <- mannequin %>%
setup(optimizer = optim_adam, loss = nn_cross_entropy_loss())
fitted <- mannequin %>%
set_opt_hparams(lr = 1e-3) %>%
match(train_dl, epochs = 10, valid_data = valid_dl)Right here is an excerpt of how coaching efficiency developed in my case:
# Epoch 1/10
# Prepare metrics: Loss: 0.504
# Legitimate metrics: Loss: 0.3154
# Epoch 2/10
# Prepare metrics: Loss: 0.2845
# Legitimate metrics: Loss: 0.2549
...
...
# Epoch 9/10
# Prepare metrics: Loss: 0.1368
# Legitimate metrics: Loss: 0.2332
# Epoch 10/10
# Prepare metrics: Loss: 0.1299
# Legitimate metrics: Loss: 0.2511Numbers are simply numbers – how good is the skilled mannequin actually at segmenting pet pictures? To seek out out, we generate segmentation masks for the primary eight observations within the validation set, and plot them overlaid on the pictures. A handy solution to plot a picture and superimpose a masks is supplied by the raster bundle.
Pixel intensities should be between zero and one, which is why within the dataset wrapper, now we have made it so normalization may be switched off. To plot the precise pictures, we simply instantiate a clone of valid_ds that leaves the pixel values unchanged. (The predictions, then again, will nonetheless should be obtained from the unique validation set.)
valid_ds_4plot <- pet_dataset(
root = dir,
cut up = "legitimate",
measurement = c(224, 224),
normalize = FALSE
)Lastly, the predictions are generated in a loop, and overlaid over the pictures one-by-one:
indices <- 1:8
preds <- predict(fitted, dataloader(dataset_subset(valid_ds, indices)))
png("pet_segmentation.png", width = 1200, top = 600, bg = "black")
par(mfcol = c(2, 4), mar = rep(2, 4))
for (i in indices) {
masks <- as.array(torch_argmax(preds[i,..], 1)$to(system = "cpu"))
masks <- raster::ratify(raster::raster(masks))
img <- as.array(valid_ds_4plot[i][[1]]$permute(c(2,3,1)))
cond <- img > 0.99999
img[cond] <- 0.99999
img <- raster::brick(img)
# plot picture
raster::plotRGB(img, scale = 1, asp = 1, margins = TRUE)
# overlay masks
plot(masks, alpha = 0.4, legend = FALSE, axes = FALSE, add = TRUE)
}
Now onto operating this mannequin “within the wild” (nicely, type of).
JIT-trace and run on Android
Tracing the skilled mannequin will convert it to a type that may be loaded in R-less environments – for instance, from Python, C++, or Java.
We entry the torch mannequin underlying the fitted luz object, and hint it – the place tracing means calling it as soon as, on a pattern statement:
m <- fitted$mannequin
x <- coro::acquire(train_dl, 1)
traced <- jit_trace(m, x[[1]]$x)The traced mannequin may now be saved to be used with Python or C++, like so:
traced %>% jit_save("traced_model.pt")Nonetheless, since we already know we’d wish to deploy it on Android, we as an alternative make use of the specialised operate jit_save_for_mobile() that, moreover, generates bytecode:
# want torch > 0.6.1
jit_save_for_mobile(traced_model, "model_bytecode.pt")And that’s it for the R facet!
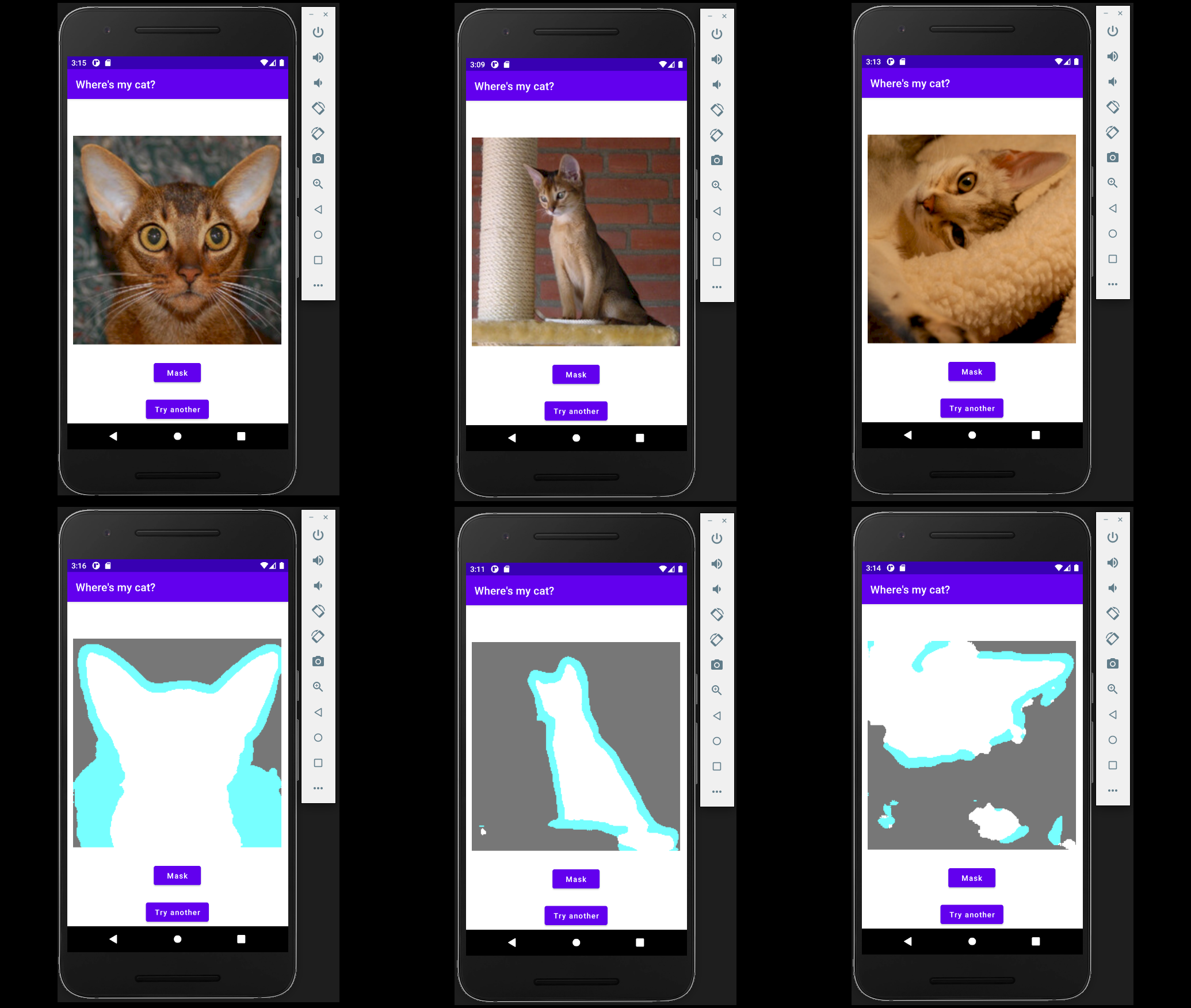
For operating on Android, I made heavy use of PyTorch Cell’s Android instance apps, particularly the picture segmentation one.
The precise proof-of-concept code for this put up (which was used to generate the beneath image) could also be discovered right here: https://github.com/skeydan/ImageSegmentation. (Be warned although – it’s my first Android software!).
In fact, we nonetheless should attempt to discover the cat. Right here is the mannequin, run on a tool emulator in Android Studio, on three pictures (from the Oxford Pet Dataset) chosen for, firstly, a variety in issue, and secondly, nicely … for cuteness:

Thanks for studying!
Parkhi, Omkar M., Andrea Vedaldi, Andrew Zisserman, and C. V. Jawahar. 2012. “Cats and Canines.” In IEEE Convention on Pc Imaginative and prescient and Sample Recognition.

{kind=link}