
A couple of weeks in the past, we offered an introduction to the duty of naming and finding objects in photographs.
Crucially, we confined ourselves to detecting a single object in a picture. Studying that article, you might need thought “can’t we simply prolong this method to a number of objects?” The quick reply is, not in a simple means. We’ll see an extended reply shortly.
On this put up, we wish to element one viable method, explaining (and coding) the steps concerned. We received’t, nonetheless, find yourself with a production-ready mannequin. So in case you learn on, you received’t have a mannequin you’ll be able to export and put in your smartphone, to be used within the wild. It is best to, nonetheless, have realized a bit about how this – object detection – is even doable. In any case, it would seem like magic!
The code beneath is closely based mostly on quick.ai’s implementation of SSD. Whereas this isn’t the primary time we’re “porting” quick.ai fashions, on this case we discovered variations in execution fashions between PyTorch and TensorFlow to be particularly putting, and we are going to briefly contact on this in our dialogue.
So why is object detection onerous?
As we noticed, we are able to classify and detect a single object as follows. We make use of a strong function extractor, comparable to Resnet 50, add a number of conv layers for specialization, after which, concatenate two outputs: one which signifies class, and one which has 4 coordinates specifying a bounding field.
Now, to detect a number of objects, can’t we simply have a number of class outputs, and several other bounding packing containers?
Sadly we are able to’t. Assume there are two cute cats within the picture, and we’ve simply two bounding field detectors.
How does every of them know which cat to detect? What occurs in apply is that each of them attempt to designate each cats, so we find yourself with two bounding packing containers within the center – the place there’s no cat. It’s a bit like averaging a bimodal distribution.
What could be executed? General, there are three approaches to object detection, differing in efficiency in each frequent senses of the phrase: execution time and precision.
Most likely the primary choice you’d consider (in case you haven’t been uncovered to the subject earlier than) is operating the algorithm over the picture piece by piece. That is known as the sliding home windows method, and although in a naive implementation, it could require extreme time, it may be run successfully if making use of totally convolutional fashions (cf. Overfeat (Sermanet et al. 2013)).
At the moment one of the best precision is gained from area proposal approaches (R-CNN(Girshick et al. 2013), Quick R-CNN(Girshick 2015), Quicker R-CNN(Ren et al. 2015)). These function in two steps. A primary step factors out areas of curiosity in a picture. Then, a convnet classifies and localizes the objects in every area.
In step one, initially non-deep-learning algorithms had been used. With Quicker R-CNN although, a convnet takes care of area proposal as effectively, such that the tactic now could be “totally deep studying.”
Final however not least, there’s the category of single shot detectors, like YOLO(Redmon et al. 2015)(Redmon and Farhadi 2016)(Redmon and Farhadi 2018)and SSD(Liu et al. 2015). Simply as Overfeat, these do a single move solely, however they add an extra function that enhances precision: anchor packing containers.

Anchor packing containers are prototypical object shapes, organized systematically over the picture. Within the easiest case, these can simply be rectangles (squares) unfold out systematically in a grid. A easy grid already solves the essential downside we began with, above: How does every detector know which object to detect? In a single-shot method like SSD, every detector is mapped to – answerable for – a particular anchor field. We’ll see how this may be achieved beneath.
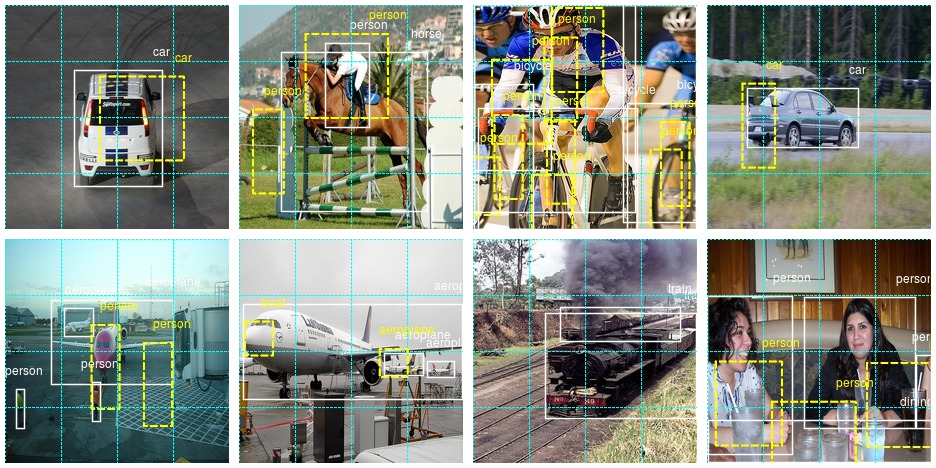
What if we’ve a number of objects in a grid cell? We are able to assign multiple anchor field to every cell. Anchor packing containers are created with totally different facet ratios, to supply a superb match to entities of various proportions, comparable to folks or bushes on the one hand, and bicycles or balconies on the opposite. You possibly can see these totally different anchor packing containers within the above determine, in illustrations b and c.
Now, what if an object spans a number of grid cells, and even the entire picture? It received’t have adequate overlap with any of the packing containers to permit for profitable detection. For that cause, SSD places detectors at a number of phases within the mannequin – a set of detectors after every successive step of downscaling. We see 8×8 and 4×4 grids within the determine above.
On this put up, we present how one can code a very primary single-shot method, impressed by SSD however not going to full lengths. We’ll have a primary 16×16 grid of uniform anchors, all utilized on the identical decision. In the long run, we point out how one can prolong this to totally different facet ratios and resolutions, specializing in the mannequin structure.
A primary single-shot detector
We’re utilizing the identical dataset as in Naming and finding objects in photographs – Pascal VOC, the 2007 version – and we begin out with the identical preprocessing steps, up and till we’ve an object imageinfo that incorporates, in each row, details about a single object in a picture.
Additional preprocessing
To have the ability to detect a number of objects, we have to mixture all data on a single picture right into a single row.
imageinfo4ssd <- imageinfo %>%
choose(category_id,
file_name,
identify,
x_left,
y_top,
x_right,
y_bottom,
ends_with("scaled"))
imageinfo4ssd <- imageinfo4ssd %>%
group_by(file_name) %>%
summarise(
classes = toString(category_id),
identify = toString(identify),
xl = toString(x_left_scaled),
yt = toString(y_top_scaled),
xr = toString(x_right_scaled),
yb = toString(y_bottom_scaled),
xl_orig = toString(x_left),
yt_orig = toString(y_top),
xr_orig = toString(x_right),
yb_orig = toString(y_bottom),
cnt = n()
)Let’s test we received this proper.
instance <- imageinfo4ssd[5, ]
img <- image_read(file.path(img_dir, instance$file_name))
identify <- (instance$identify %>% str_split(sample = ", "))[[1]]
x_left <- (instance$xl_orig %>% str_split(sample = ", "))[[1]]
x_right <- (instance$xr_orig %>% str_split(sample = ", "))[[1]]
y_top <- (instance$yt_orig %>% str_split(sample = ", "))[[1]]
y_bottom <- (instance$yb_orig %>% str_split(sample = ", "))[[1]]
img <- image_draw(img)
for (i in 1:instance$cnt) {
rect(x_left[i],
y_bottom[i],
x_right[i],
y_top[i],
border = "white",
lwd = 2)
textual content(
x = as.integer(x_right[i]),
y = as.integer(y_top[i]),
labels = identify[i],
offset = 1,
pos = 2,
cex = 1,
col = "white"
)
}
dev.off()
print(img)
Now we assemble the anchor packing containers.
Anchors
Like we stated above, right here we may have one anchor field per cell. Thus, grid cells and anchor packing containers, in our case, are the identical factor, and we’ll name them by each names, interchangingly, relying on the context.
Simply remember the fact that in additional complicated fashions, these will likely be totally different entities.
Our grid shall be of dimension 4×4. We’ll want the cells’ coordinates, and we’ll begin with a heart x – heart y – top – width illustration.
Right here, first, are the middle coordinates.
We are able to plot them.
ggplot(information.body(x = anchor_xs, y = anchor_ys), aes(x, y)) +
geom_point() +
coord_cartesian(xlim = c(0,1), ylim = c(0,1)) +
theme(facet.ratio = 1)
The middle coordinates are supplemented by top and width:
Combining facilities, heights and widths provides us the primary illustration.
anchors <- cbind(anchor_centers, anchor_height_width)
anchors [,1] [,2] [,3] [,4]
[1,] 0.125 0.125 0.25 0.25
[2,] 0.125 0.375 0.25 0.25
[3,] 0.125 0.625 0.25 0.25
[4,] 0.125 0.875 0.25 0.25
[5,] 0.375 0.125 0.25 0.25
[6,] 0.375 0.375 0.25 0.25
[7,] 0.375 0.625 0.25 0.25
[8,] 0.375 0.875 0.25 0.25
[9,] 0.625 0.125 0.25 0.25
[10,] 0.625 0.375 0.25 0.25
[11,] 0.625 0.625 0.25 0.25
[12,] 0.625 0.875 0.25 0.25
[13,] 0.875 0.125 0.25 0.25
[14,] 0.875 0.375 0.25 0.25
[15,] 0.875 0.625 0.25 0.25
[16,] 0.875 0.875 0.25 0.25In subsequent manipulations, we are going to typically we want a distinct illustration: the corners (top-left, top-right, bottom-right, bottom-left) of the grid cells.
hw2corners <- perform(facilities, height_width) {
cbind(facilities - height_width / 2, facilities + height_width / 2) %>% unname()
}
# cells are indicated by (xl, yt, xr, yb)
# successive rows first go down within the picture, then to the precise
anchor_corners <- hw2corners(anchor_centers, anchor_height_width)
anchor_corners [,1] [,2] [,3] [,4]
[1,] 0.00 0.00 0.25 0.25
[2,] 0.00 0.25 0.25 0.50
[3,] 0.00 0.50 0.25 0.75
[4,] 0.00 0.75 0.25 1.00
[5,] 0.25 0.00 0.50 0.25
[6,] 0.25 0.25 0.50 0.50
[7,] 0.25 0.50 0.50 0.75
[8,] 0.25 0.75 0.50 1.00
[9,] 0.50 0.00 0.75 0.25
[10,] 0.50 0.25 0.75 0.50
[11,] 0.50 0.50 0.75 0.75
[12,] 0.50 0.75 0.75 1.00
[13,] 0.75 0.00 1.00 0.25
[14,] 0.75 0.25 1.00 0.50
[15,] 0.75 0.50 1.00 0.75
[16,] 0.75 0.75 1.00 1.00Let’s take our pattern picture once more and plot it, this time together with the grid cells.
Notice that we show the scaled picture now – the way in which the community goes to see it.
instance <- imageinfo4ssd[5, ]
identify <- (instance$identify %>% str_split(sample = ", "))[[1]]
x_left <- (instance$xl %>% str_split(sample = ", "))[[1]]
x_right <- (instance$xr %>% str_split(sample = ", "))[[1]]
y_top <- (instance$yt %>% str_split(sample = ", "))[[1]]
y_bottom <- (instance$yb %>% str_split(sample = ", "))[[1]]
img <- image_read(file.path(img_dir, instance$file_name))
img <- image_resize(img, geometry = "224x224!")
img <- image_draw(img)
for (i in 1:instance$cnt) {
rect(x_left[i],
y_bottom[i],
x_right[i],
y_top[i],
border = "white",
lwd = 2)
textual content(
x = as.integer(x_right[i]),
y = as.integer(y_top[i]),
labels = identify[i],
offset = 0,
pos = 2,
cex = 1,
col = "white"
)
}
for (i in 1:nrow(anchor_corners)) {
rect(
anchor_corners[i, 1] * 224,
anchor_corners[i, 4] * 224,
anchor_corners[i, 3] * 224,
anchor_corners[i, 2] * 224,
border = "cyan",
lwd = 1,
lty = 3
)
}
dev.off()
print(img)
Now it’s time to handle the presumably biggest thriller whenever you’re new to object detection: How do you truly assemble the bottom fact enter to the community?
That’s the so-called “matching downside.”
Matching downside
To coach the community, we have to assign the bottom fact packing containers to the grid cells/anchor packing containers. We do that based mostly on overlap between bounding packing containers on the one hand, and anchor packing containers on the opposite.
Overlap is computed utilizing Intersection over Union (IoU, =Jaccard Index), as typical.
Assume we’ve already computed the Jaccard index for all floor fact field – grid cell combos. We then use the next algorithm:
-
For every floor fact object, discover the grid cell it maximally overlaps with.
-
For every grid cell, discover the article it overlaps with most.
-
In each circumstances, determine the entity of biggest overlap in addition to the quantity of overlap.
-
When criterium (1) applies, it overrides criterium (2).
-
When criterium (1) applies, set the quantity overlap to a relentless, excessive worth: 1.99.
-
Return the mixed outcome, that’s, for every grid cell, the article and quantity of greatest (as per the above standards) overlap.
Right here’s the implementation.
# overlaps form is: variety of floor fact objects * variety of grid cells
map_to_ground_truth <- perform(overlaps) {
# for every floor fact object, discover maximally overlapping cell (crit. 1)
# measure of overlap, form: variety of floor fact objects
prior_overlap <- apply(overlaps, 1, max)
# which cell is that this, for every object
prior_idx <- apply(overlaps, 1, which.max)
# for every grid cell, what object does it overlap with most (crit. 2)
# measure of overlap, form: variety of grid cells
gt_overlap <- apply(overlaps, 2, max)
# which object is that this, for every cell
gt_idx <- apply(overlaps, 2, which.max)
# set all undoubtedly overlapping cells to respective object (crit. 1)
gt_overlap[prior_idx] <- 1.99
# now nonetheless set all others to greatest match by crit. 2
# truly it is different means spherical, we begin from (2) and overwrite with (1)
for (i in 1:size(prior_idx)) {
# iterate over all cells "completely assigned"
p <- prior_idx[i] # get respective grid cell
gt_idx[p] <- i # assign this cell the article quantity
}
# return: for every grid cell, object it overlaps with most + measure of overlap
checklist(gt_overlap, gt_idx)
}Now right here’s the IoU calculation we want for that. We are able to’t simply use the IoU perform from the earlier put up as a result of this time, we wish to compute overlaps with all grid cells concurrently.
It’s best to do that utilizing tensors, so we briefly convert the R matrices to tensors:
# compute IOU
jaccard <- perform(bbox, anchor_corners) {
bbox <- k_constant(bbox)
anchor_corners <- k_constant(anchor_corners)
intersection <- intersect(bbox, anchor_corners)
union <-
k_expand_dims(box_area(bbox), axis = 2) + k_expand_dims(box_area(anchor_corners), axis = 1) - intersection
res <- intersection / union
res %>% k_eval()
}
# compute intersection for IOU
intersect <- perform(box1, box2) {
box1_a <- box1[, 3:4] %>% k_expand_dims(axis = 2)
box2_a <- box2[, 3:4] %>% k_expand_dims(axis = 1)
max_xy <- k_minimum(box1_a, box2_a)
box1_b <- box1[, 1:2] %>% k_expand_dims(axis = 2)
box2_b <- box2[, 1:2] %>% k_expand_dims(axis = 1)
min_xy <- k_maximum(box1_b, box2_b)
intersection <- k_clip(max_xy - min_xy, min = 0, max = Inf)
intersection[, , 1] * intersection[, , 2]
}
box_area <- perform(field) {
(field[, 3] - field[, 1]) * (field[, 4] - field[, 2])
}By now you may be questioning – when does all this occur? Curiously, the instance we’re following, quick.ai’s object detection pocket book, does all this as a part of the loss calculation!
In TensorFlow, that is doable in precept (requiring some juggling of tf$cond, tf$while_loop and many others., in addition to a little bit of creativity discovering replacements for non-differentiable operations).
However, easy information – just like the Keras loss perform anticipating the identical shapes for y_true and y_pred – made it not possible to observe the quick.ai method. As a substitute, all matching will happen within the information generator.
Knowledge generator
The generator has the acquainted construction, identified from the predecessor put up.
Right here is the whole code – we’ll speak by the main points instantly.
batch_size <- 16
image_size <- target_width # identical as top
threshold <- 0.4
class_background <- 21
ssd_generator <-
perform(information,
target_height,
target_width,
shuffle,
batch_size) {
i <- 1
perform() {
if (shuffle) {
indices <- pattern(1:nrow(information), dimension = batch_size)
} else {
if (i + batch_size >= nrow(information))
i <<- 1
indices <- c(i:min(i + batch_size - 1, nrow(information)))
i <<- i + size(indices)
}
x <-
array(0, dim = c(size(indices), target_height, target_width, 3))
y1 <- array(0, dim = c(size(indices), 16))
y2 <- array(0, dim = c(size(indices), 16, 4))
for (j in 1:size(indices)) {
x[j, , , ] <-
load_and_preprocess_image(information[[indices[j], "file_name"]], target_height, target_width)
class_string <- information[indices[j], ]$classes
xl_string <- information[indices[j], ]$xl
yt_string <- information[indices[j], ]$yt
xr_string <- information[indices[j], ]$xr
yb_string <- information[indices[j], ]$yb
courses <- str_split(class_string, sample = ", ")[[1]]
xl <-
str_split(xl_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)
yt <-
str_split(yt_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)
xr <-
str_split(xr_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)
yb <-
str_split(yb_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)
# rows are objects, columns are coordinates (xl, yt, xr, yb)
# anchor_corners are 16 rows with corresponding coordinates
bbox <- cbind(xl, yt, xr, yb)
overlaps <- jaccard(bbox, anchor_corners)
c(gt_overlap, gt_idx) %<-% map_to_ground_truth(overlaps)
gt_class <- courses[gt_idx]
pos <- gt_overlap > threshold
gt_class[gt_overlap < threshold] <- 21
# columns correspond to things
packing containers <- rbind(xl, yt, xr, yb)
# columns correspond to object packing containers based on gt_idx
gt_bbox <- packing containers[, gt_idx]
# set these with non-sufficient overlap to 0
gt_bbox[, !pos] <- 0
gt_bbox <- gt_bbox %>% t()
y1[j, ] <- as.integer(gt_class) - 1
y2[j, , ] <- gt_bbox
}
x <- x %>% imagenet_preprocess_input()
y1 <- y1 %>% to_categorical(num_classes = class_background)
checklist(x, checklist(y1, y2))
}
}Earlier than the generator can set off any calculations, it must first break up aside the a number of courses and bounding field coordinates that are available one row of the dataset.
To make this extra concrete, we present what occurs for the “2 folks and a pair of airplanes” picture we simply displayed.
We copy out code chunk-by-chunk from the generator so outcomes can truly be displayed for inspection.
information <- imageinfo4ssd
indices <- 1:8
j <- 5 # that is our picture
class_string <- information[indices[j], ]$classes
xl_string <- information[indices[j], ]$xl
yt_string <- information[indices[j], ]$yt
xr_string <- information[indices[j], ]$xr
yb_string <- information[indices[j], ]$yb
courses <- str_split(class_string, sample = ", ")[[1]]
xl <- str_split(xl_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)
yt <- str_split(yt_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)
xr <- str_split(xr_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)
yb <- str_split(yb_string, sample = ", ")[[1]] %>% as.double() %>% `/`(image_size)So listed here are that picture’s courses:
[1] "1" "1" "15" "15"And its left bounding field coordinates:
[1] 0.20535714 0.26339286 0.38839286 0.04910714Now we are able to cbind these vectors collectively to acquire a object (bbox) the place rows are objects, and coordinates are within the columns:
# rows are objects, columns are coordinates (xl, yt, xr, yb)
bbox <- cbind(xl, yt, xr, yb)
bbox xl yt xr yb
[1,] 0.20535714 0.2723214 0.75000000 0.6473214
[2,] 0.26339286 0.3080357 0.39285714 0.4330357
[3,] 0.38839286 0.6383929 0.42410714 0.8125000
[4,] 0.04910714 0.6696429 0.08482143 0.8437500So we’re able to compute these packing containers’ overlap with all the 16 grid cells. Recall that anchor_corners shops the grid cells in an identical means, the cells being within the rows and the coordinates within the columns.
# anchor_corners are 16 rows with corresponding coordinates
overlaps <- jaccard(bbox, anchor_corners)Now that we’ve the overlaps, we are able to name the matching logic:
c(gt_overlap, gt_idx) %<-% map_to_ground_truth(overlaps)
gt_overlap [1] 0.00000000 0.03961473 0.04358353 1.99000000 0.00000000 1.99000000 1.99000000 0.03357313 0.00000000
[10] 0.27127662 0.16019417 0.00000000 0.00000000 0.00000000 0.00000000 0.00000000In search of the worth 1.99 within the above – the worth indicating maximal, by the above standards, overlap of an object with a grid cell – we see that field 4 (counting in column-major order right here like R does) received matched (to an individual, as we’ll see quickly), field 6 did (to an airplane), and field 7 did (to an individual). How in regards to the different airplane? It received misplaced within the matching.
This isn’t an issue of the matching algorithm although – it could disappear if we had multiple anchor field per grid cell.
In search of the objects simply talked about within the class index, gt_idx, we see that certainly field 4 received matched to object 4 (an individual), field 6 received matched to object 2 (an airplane), and field 7 received matched to object 3 (the opposite individual):
[1] 1 1 4 4 1 2 3 3 1 1 1 1 1 1 1 1By the way in which, don’t fear in regards to the abundance of 1s right here. These are remnants from utilizing which.max to find out maximal overlap, and can disappear quickly.
As a substitute of pondering in object numbers, we should always suppose in object courses (the respective numerical codes, that’s).
gt_class <- courses[gt_idx]
gt_class [1] "1" "1" "15" "15" "1" "1" "15" "15" "1" "1" "1" "1" "1" "1" "1" "1"Up to now, we consider even the very slightest overlap – of 0.1 %, say.
After all, this is not sensible. We set all cells with an overlap < 0.4 to the background class:
pos <- gt_overlap > threshold
gt_class[gt_overlap < threshold] <- 21
gt_class[1] "21" "21" "21" "15" "21" "1" "15" "21" "21" "21" "21" "21" "21" "21" "21" "21"Now, to assemble the targets for studying, we have to put the mapping we discovered into a knowledge construction.
The next provides us a 16×4 matrix of cells and the packing containers they’re answerable for:
xl yt xr yb
[1,] 0.00000000 0.0000000 0.00000000 0.0000000
[2,] 0.00000000 0.0000000 0.00000000 0.0000000
[3,] 0.00000000 0.0000000 0.00000000 0.0000000
[4,] 0.04910714 0.6696429 0.08482143 0.8437500
[5,] 0.00000000 0.0000000 0.00000000 0.0000000
[6,] 0.26339286 0.3080357 0.39285714 0.4330357
[7,] 0.38839286 0.6383929 0.42410714 0.8125000
[8,] 0.00000000 0.0000000 0.00000000 0.0000000
[9,] 0.00000000 0.0000000 0.00000000 0.0000000
[10,] 0.00000000 0.0000000 0.00000000 0.0000000
[11,] 0.00000000 0.0000000 0.00000000 0.0000000
[12,] 0.00000000 0.0000000 0.00000000 0.0000000
[13,] 0.00000000 0.0000000 0.00000000 0.0000000
[14,] 0.00000000 0.0000000 0.00000000 0.0000000
[15,] 0.00000000 0.0000000 0.00000000 0.0000000
[16,] 0.00000000 0.0000000 0.00000000 0.0000000Collectively, gt_bbox and gt_class make up the community’s studying targets.
y1[j, ] <- as.integer(gt_class) - 1
y2[j, , ] <- gt_bboxTo summarize, our goal is an inventory of two outputs:
- the bounding field floor fact of dimensionality variety of grid cells occasions variety of field coordinates, and
- the category floor fact of dimension variety of grid cells occasions variety of courses.
We are able to confirm this by asking the generator for a batch of inputs and targets:
[1] 16 16 21[1] 16 16 4Lastly, we’re prepared for the mannequin.
The mannequin
We begin from Resnet 50 as a function extractor. This provides us tensors of dimension 7x7x2048.
feature_extractor <- application_resnet50(
include_top = FALSE,
input_shape = c(224, 224, 3)
)Then, we append a number of conv layers. Three of these layers are “simply” there for capability; the final one although has a extra job: By advantage of strides = 2, it downsamples its enter to from 7×7 to 4×4 within the top/width dimensions.
This decision of 4×4 provides us precisely the grid we want!
enter <- feature_extractor$enter
frequent <- feature_extractor$output %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
padding = "identical",
activation = "relu",
identify = "head_conv1_1"
) %>%
layer_batch_normalization() %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
padding = "identical",
activation = "relu",
identify = "head_conv1_2"
) %>%
layer_batch_normalization() %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
padding = "identical",
activation = "relu",
identify = "head_conv1_3"
) %>%
layer_batch_normalization() %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
strides = 2,
padding = "identical",
activation = "relu",
identify = "head_conv2"
) %>%
layer_batch_normalization() Now we are able to do as we did in that different put up, connect one output for the bounding packing containers and one for the courses.
Notice how we don’t mixture over the spatial grid although. As a substitute, we reshape it so the 4×4 grid cells seem sequentially.
Right here first is the category output. We now have 21 courses (the 20 courses from PASCAL, plus background), and we have to classify every cell. We thus find yourself with an output of dimension 16×21.
class_output <-
layer_conv_2d(
frequent,
filters = 21,
kernel_size = 3,
padding = "identical",
identify = "class_conv"
) %>%
layer_reshape(target_shape = c(16, 21), identify = "class_output")For the bounding field output, we apply a tanh activation in order that values lie between -1 and 1. It’s because they’re used to compute offsets to the grid cell facilities.
These computations occur within the layer_lambda. We begin from the precise anchor field facilities, and transfer them round by a scaled-down model of the activations.
We then convert these to anchor corners – identical as we did above with the bottom fact anchors, simply working on tensors, this time.
bbox_output <-
layer_conv_2d(
frequent,
filters = 4,
kernel_size = 3,
padding = "identical",
identify = "bbox_conv"
) %>%
layer_reshape(target_shape = c(16, 4), identify = "bbox_flatten") %>%
layer_activation("tanh") %>%
layer_lambda(
f = perform(x) {
activation_centers <-
(x[, , 1:2] / 2 * gridsize) + k_constant(anchors[, 1:2])
activation_height_width <-
(x[, , 3:4] / 2 + 1) * k_constant(anchors[, 3:4])
activation_corners <-
k_concatenate(
checklist(
activation_centers - activation_height_width / 2,
activation_centers + activation_height_width / 2
)
)
activation_corners
},
identify = "bbox_output"
)Now that we’ve all layers, let’s shortly end up the mannequin definition:
mannequin <- keras_model(
inputs = enter,
outputs = checklist(class_output, bbox_output)
)The final ingredient lacking, then, is the loss perform.
Loss
To the mannequin’s two outputs – a classification output and a regression output – correspond two losses, simply as within the primary classification + localization mannequin. Solely this time, we’ve 16 grid cells to maintain.
Class loss makes use of tf$nn$sigmoid_cross_entropy_with_logits to compute the binary crossentropy between targets and unnormalized community activation, summing over grid cells and dividing by the variety of courses.
# shapes are batch_size * 16 * 21
class_loss <- perform(y_true, y_pred) {
class_loss <-
tf$nn$sigmoid_cross_entropy_with_logits(labels = y_true, logits = y_pred)
class_loss <-
tf$reduce_sum(class_loss) / tf$forged(n_classes + 1, "float32")
class_loss
}Localization loss is calculated for all packing containers the place the truth is there is an object current within the floor fact. All different activations get masked out.
The loss itself then is simply imply absolute error, scaled by a multiplier designed to convey each loss parts to related magnitudes. In apply, it is smart to experiment a bit right here.
# shapes are batch_size * 16 * 4
bbox_loss <- perform(y_true, y_pred) {
# calculate localization loss for all packing containers the place floor fact was assigned some overlap
# calculate masks
pos <- y_true[, , 1] + y_true[, , 3] > 0
pos <-
pos %>% k_cast(tf$float32) %>% k_reshape(form = c(batch_size, 16, 1))
pos <-
tf$tile(pos, multiples = k_constant(c(1L, 1L, 4L), dtype = tf$int32))
diff <- y_pred - y_true
# masks out irrelevant activations
diff <- diff %>% tf$multiply(pos)
loc_loss <- diff %>% tf$abs() %>% tf$reduce_mean()
loc_loss * 100
}Above, we’ve already outlined the mannequin however we nonetheless have to freeze the function detector’s weights and compile it.
mannequin %>% freeze_weights()
mannequin %>% unfreeze_weights(from = "head_conv1_1")
mannequinAnd we’re prepared to coach. Coaching this mannequin may be very time consuming, such that for purposes “in the true world,” we’d wish to do optimize this system for reminiscence consumption and runtime.
Like we stated above, on this put up we’re actually specializing in understanding the method.
steps_per_epoch <- nrow(imageinfo4ssd) / batch_size
mannequin %>% fit_generator(
train_gen,
steps_per_epoch = steps_per_epoch,
epochs = 5,
callbacks = callback_model_checkpoint(
"weights.{epoch:02d}-{loss:.2f}.hdf5",
save_weights_only = TRUE
)
)After 5 epochs, that is what we get from the mannequin. It’s on the precise means, however it should want many extra epochs to succeed in respectable efficiency.

Other than coaching for a lot of extra epochs, what might we do? We’ll wrap up the put up with two instructions for enchancment, however received’t implement them fully.
The primary one truly is fast to implement. Right here we go.
Focal loss
Above, we had been utilizing cross entropy for the classification loss. Let’s take a look at what that entails.

The determine reveals loss incurred when the right reply is 1. We see that although loss is highest when the community may be very unsuitable, it nonetheless incurs important loss when it’s “proper for all sensible functions” – which means, its output is simply above 0.5.
In circumstances of robust class imbalance, this habits could be problematic. A lot coaching vitality is wasted on getting “much more proper” on circumstances the place the online is correct already – as will occur with cases of the dominant class. As a substitute, the community ought to dedicate extra effort to the onerous circumstances – exemplars of the rarer courses.
In object detection, the prevalent class is background – no class, actually. As a substitute of getting an increasing number of proficient at predicting background, the community had higher discover ways to inform aside the precise object courses.
Another was identified by the authors of the RetinaNet paper(Lin et al. 2017): They launched a parameter (gamma) that leads to lowering loss for samples that have already got been effectively categorized.

Totally different implementations are discovered on the web, in addition to totally different settings for the hyperparameters. Right here’s a direct port of the quick.ai code:
alpha <- 0.25
gamma <- 1
get_weights <- perform(y_true, y_pred) {
p <- y_pred %>% k_sigmoid()
pt <- y_true*p + (1-p)*(1-y_true)
w <- alpha*y_true + (1-alpha)*(1-y_true)
w <- w * (1-pt)^gamma
w
}
class_loss_focal <- perform(y_true, y_pred) {
w <- get_weights(y_true, y_pred)
cx <- tf$nn$sigmoid_cross_entropy_with_logits(labels = y_true, logits = y_pred)
weighted_cx <- w * cx
class_loss <-
tf$reduce_sum(weighted_cx) / tf$forged(21, "float32")
class_loss
}From testing this loss, it appears to yield higher efficiency, however doesn’t render out of date the necessity for substantive coaching time.
Lastly, let’s see what we’d need to do if we needed to make use of a number of anchor packing containers per grid cells.
Extra anchor packing containers
The “actual SSD” has anchor packing containers of various facet ratios, and it places detectors at totally different phases of the community. Let’s implement this.
Anchor field coordinates
We create anchor packing containers as combos of
anchor_zooms <- c(0.7, 1, 1.3)
anchor_zooms[1] 0.7 1.0 1.3 [,1] [,2]
[1,] 1.0 1.0
[2,] 1.0 0.5
[3,] 0.5 1.0On this instance, we’ve 9 totally different combos:
[,1] [,2]
[1,] 0.70 0.70
[2,] 0.70 0.35
[3,] 0.35 0.70
[4,] 1.00 1.00
[5,] 1.00 0.50
[6,] 0.50 1.00
[7,] 1.30 1.30
[8,] 1.30 0.65
[9,] 0.65 1.30We place detectors at three phases. Resolutions shall be 4×4 (as we had earlier than) and moreover, 2×2 and 1×1:
As soon as that’s been decided, we are able to compute
- x coordinates of the field facilities:
- y coordinates of the field facilities:
- the x-y representations of the facilities:
- the sizes of the bottom grids (0.25, 0.5, and 1):
- the centers-width-height representations of the anchor packing containers:
anchors <- cbind(anchor_centers, anchor_sizes)- and eventually, the corners illustration of the packing containers!
So right here, then, is a plot of the (distinct) field facilities: One within the center, for the 9 giant packing containers, 4 for the 4 * 9 medium-size packing containers, and 16 for the 16 * 9 small packing containers.

After all, even when we aren’t going to coach this model, we not less than have to see these in motion!

How would a mannequin look that would take care of these?
Mannequin
Once more, we’d begin from a function detector …
feature_extractor <- application_resnet50(
include_top = FALSE,
input_shape = c(224, 224, 3)
)… and connect some customized conv layers.
enter <- feature_extractor$enter
frequent <- feature_extractor$output %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
padding = "identical",
activation = "relu",
identify = "head_conv1_1"
) %>%
layer_batch_normalization() %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
padding = "identical",
activation = "relu",
identify = "head_conv1_2"
) %>%
layer_batch_normalization() %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
padding = "identical",
activation = "relu",
identify = "head_conv1_3"
) %>%
layer_batch_normalization()Then, issues get totally different. We wish to connect detectors (= output layers) to totally different phases in a pipeline of successive downsamplings.
If that doesn’t name for the Keras practical API…
Right here’s the downsizing pipeline.
downscale_4x4 <- frequent %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
strides = 2,
padding = "identical",
activation = "relu",
identify = "downscale_4x4"
) %>%
layer_batch_normalization() downscale_2x2 <- downscale_4x4 %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
strides = 2,
padding = "identical",
activation = "relu",
identify = "downscale_2x2"
) %>%
layer_batch_normalization() downscale_1x1 <- downscale_2x2 %>%
layer_conv_2d(
filters = 256,
kernel_size = 3,
strides = 2,
padding = "identical",
activation = "relu",
identify = "downscale_1x1"
) %>%
layer_batch_normalization() The bounding field output definitions get a bit messier than earlier than, as every output has to consider its relative anchor field coordinates.
create_bbox_output <- perform(prev_layer, anchor_start, anchor_stop, suffix) {
output <- layer_conv_2d(
prev_layer,
filters = 4 * okay,
kernel_size = 3,
padding = "identical",
identify = paste0("bbox_conv_", suffix)
) %>%
layer_reshape(target_shape = c(-1, 4), identify = paste0("bbox_flatten_", suffix)) %>%
layer_activation("tanh") %>%
layer_lambda(
f = perform(x) {
activation_centers <-
(x[, , 1:2] / 2 * matrix(grid_sizes[anchor_start:anchor_stop], ncol = 1)) +
k_constant(anchors[anchor_start:anchor_stop, 1:2])
activation_height_width <-
(x[, , 3:4] / 2 + 1) * k_constant(anchors[anchor_start:anchor_stop, 3:4])
activation_corners <-
k_concatenate(
checklist(
activation_centers - activation_height_width / 2,
activation_centers + activation_height_width / 2
)
)
activation_corners
},
identify = paste0("bbox_output_", suffix)
)
output
}Right here they’re: Every one hooked up to it’s respective stage of motion within the pipeline.
bbox_output_4x4 <- create_bbox_output(downscale_4x4, 1, 144, "4x4")bbox_output_2x2 <- create_bbox_output(downscale_2x2, 145, 180, "2x2")bbox_output_1x1 <- create_bbox_output(downscale_1x1, 181, 189, "1x1")The identical precept applies to the category outputs.
class_output_4x4 <- create_class_output(downscale_4x4, "4x4")class_output_2x2 <- create_class_output(downscale_2x2, "2x2")class_output_1x1 <- create_class_output(downscale_1x1, "1x1")And glue all of it collectively, to get the mannequin.
mannequin <- keras_model(
inputs = enter,
outputs = checklist(
bbox_output_1x1,
bbox_output_2x2,
bbox_output_4x4,
class_output_1x1,
class_output_2x2,
class_output_4x4)
)Now, we are going to cease right here. To run this, there’s one other factor that needs to be adjusted: the information generator.
Our focus being on explaining the ideas although, we’ll depart that to the reader.
Conclusion
Whereas we haven’t ended up with a good-performing mannequin for object detection, we do hope that we’ve managed to shed some gentle on the thriller of object detection. What’s a bounding field? What’s an anchor (resp. prior, rep. default) field? How do you match them up in apply?
In the event you’ve “simply” learn the papers (YOLO, SSD), however by no means seen any code, it might seem to be all actions occur in some wonderland past the horizon. They don’t. However coding them, as we’ve seen, could be cumbersome, even within the very primary variations we’ve applied. To carry out object detection in manufacturing, then, much more time needs to be spent on coaching and tuning fashions. However typically simply studying about how one thing works could be very satisfying.
Lastly, we’d once more wish to stress how a lot this put up leans on what the quick.ai guys did. Their work most undoubtedly is enriching not simply the PyTorch, but in addition the R-TensorFlow neighborhood!

{kind=link}