
Why a very (that means: VERY!) first conceptual introduction to Hamiltonian Monte Carlo (HMC) on this weblog?
Effectively, in our endeavor to function the varied capabilities of TensorFlow Likelihood (TFP) / tfprobability, we began exhibiting examples of the best way to match hierarchical fashions, utilizing one in every of TFP’s joint distribution lessons and HMC. The technical elements being advanced sufficient in themselves, we by no means gave an introduction to the “math aspect of issues.” Right here we try to make up for this.
Seeing how it’s inconceivable, in a brief weblog publish, to offer an introduction to Bayesian modeling and Markov Chain Monte Carlo generally, and the way there are such a lot of wonderful texts doing this already, we’ll presuppose some prior data. Our particular focus then is on the newest and best, the magic buzzwords, the well-known incantations: Hamiltonian Monte Carlo, leapfrog steps, NUTS – as all the time, making an attempt to demystify, to make issues as comprehensible as attainable.
In that spirit, welcome to a “glossary with a story.”
So what’s it for?
Sampling, or Monte Carlo, strategies generally are used once we need to produce samples from, or statistically describe a distribution we don’t have a closed-form formulation of. Typically, we would actually have an interest within the samples; generally we simply need them so we are able to compute, for instance, the imply and variance of the distribution.
What distribution? In the kind of functions we’re speaking about, we have now a mannequin, a joint distribution, which is meant to explain some actuality. Ranging from probably the most primary situation, it’d appear to be this:
[
x sim mathcal{Poisson}(lambda)
]
This “joint distribution” solely has a single member, a Poisson distribution, that’s alleged to mannequin, say, the variety of feedback in a code evaluation. We even have knowledge on precise code critiques, like this, say:

We now need to decide the parameter, (lambda), of the Poisson that make these knowledge most probably. To this point, we’re not even being Bayesian but: There isn’t any prior on this parameter. However after all, we need to be Bayesian, so we add one – think about mounted priors on its parameters:
[
x sim mathcal{Poisson}(lambda)
lambda sim gamma(alpha, beta)
alpha sim […]
beta sim […]
]
This being a joint distribution, we have now three parameters to find out: (lambda), (alpha) and (beta).
And what we’re desirous about is the posterior distribution of the parameters given the information.
Now, relying on the distributions concerned, we often can not calculate the posterior distributions in closed kind. As a substitute, we have now to make use of sampling strategies to find out these parameters. What we’d wish to level out as an alternative is the next: Within the upcoming discussions of sampling, HMC & co., it’s very easy to overlook what’s it that we’re sampling. Attempt to all the time remember the fact that what we’re sampling isn’t the information, it’s parameters: the parameters of the posterior distributions we’re desirous about.
Sampling
Sampling strategies generally encompass two steps: producing a pattern (“proposal”) and deciding whether or not to maintain it or to throw it away (“acceptance”). Intuitively, in our given situation – the place we have now measured one thing and at the moment are on the lookout for a mechanism that explains these measurements – the latter ought to be simpler: We “simply” want to find out the chance of the information underneath these hypothetical mannequin parameters. However how will we give you recommendations to start out with?
In concept, simple(-ish) strategies exist that might be used to generate samples from an unknown (in closed kind) distribution – so long as their unnormalized chances may be evaluated, and the issue is (very) low-dimensional. (For concise portraits of these strategies, similar to uniform sampling, significance sampling, and rejection sampling, see(MacKay 2002).) These should not utilized in MCMC software program although, for lack of effectivity and non-suitability in excessive dimensions. Earlier than HMC grew to become the dominant algorithm in such software program, the Metropolis and Gibbs strategies have been the algorithms of selection. Each are properly and understandably defined – within the case of Metropolis, usually exemplified by good tales –, and we refer the reader to the go-to references, similar to (McElreath 2016) and (Kruschke 2010). Each have been proven to be much less environment friendly than HMC, the primary subject of this publish, resulting from their random-walk habits: Each proposal is predicated on the present place in state area, that means that samples could also be extremely correlated and state area exploration proceeds slowly.
HMC
So HMC is standard as a result of in comparison with random-walk-based algorithms, it’s a lot extra environment friendly. Sadly, additionally it is much more troublesome to “get.” As mentioned in Math, code, ideas: A 3rd highway to deep studying, there appear to be (no less than) three languages to precise an algorithm: Math; code (together with pseudo-code, which can or will not be on the verge to math notation); and one I name conceptual which spans the entire vary from very summary to very concrete, even visible. To me personally, HMC is completely different from most different circumstances in that although I discover the conceptual explanations fascinating, they end in much less “perceived understanding” than both the equations or the code. For individuals with backgrounds in physics, statistical mechanics and/or differential geometry this may most likely be completely different!
In any case, bodily analogies make for the most effective begin.
Bodily analogies
The basic bodily analogy is given within the reference article, Radford Neal’s “MCMC utilizing Hamiltonian dynamics” (Neal 2012), and properly defined in a video by Ben Lambert.
So there’s this “factor” we need to maximize, the loglikelihood of the information underneath the mannequin parameters. Alternatively we are able to say, we need to decrease the unfavorable loglikelihood (like loss in a neural community). This “factor” to be optimized can then be visualized as an object sliding over a panorama with hills and valleys, and like with gradient descent in deep studying, we wish it to finish up deep down in some valley.
In Neal’s personal phrases
In two dimensions, we are able to visualize the dynamics as that of a frictionless puck that slides over a floor of various peak. The state of this method consists of the place of the puck, given by a 2D vector q, and the momentum of the puck (its mass occasions its velocity), given by a 2D vector p.
Now while you hear “momentum” (and provided that I’ve primed you to consider deep studying) it’s possible you’ll really feel that sounds acquainted, however although the respective analogies are associated the affiliation doesn’t assist that a lot. In deep studying, momentum is usually praised for its avoidance of ineffective oscillations in imbalanced optimization landscapes.
With HMC nevertheless, the main target is on the idea of power.
In statistical mechanics, the chance of being in some state (i) is inverse-exponentially associated to its power. (Right here (T) is the temperature; we gained’t give attention to this so simply think about it being set to 1 on this and subsequent equations.)
[P(E_i) sim e^{frac{-E_i}{T}} ]
As you would possibly or may not bear in mind from faculty physics, power is available in two types: potential power and kinetic power. Within the sliding-object situation, the thing’s potential power corresponds to its peak (place), whereas its kinetic power is said to its momentum, (m), by the formulation
[K(m) = frac{m^2}{2 * mass} ]
Now with out kinetic power, the thing would slide downhill all the time, and as quickly because the panorama slopes up once more, would come to a halt. Via its momentum although, it is ready to proceed uphill for some time, simply as if, going downhill in your bike, you decide up velocity it’s possible you’ll make it over the subsequent (quick) hill with out pedaling.
In order that’s kinetic power. The opposite half, potential power, corresponds to the factor we actually need to know – the unfavorable log posterior of the parameters we’re actually after:
[U(theta) sim – log (P(x | theta) P(theta))]
So the “trick” of HMC is augmenting the state area of curiosity – the vector of posterior parameters – by a momentum vector, to enhance optimization effectivity. After we’re completed, the momentum half is simply thrown away. (This side is particularly properly defined in Ben Lambert’s video.)
Following his exposition and notation, right here we have now the power of a state of parameter and momentum vectors, equaling a sum of potential and kinetic energies:
[E(theta, m) = U(theta) + K(m)]
The corresponding chance, as per the connection given above, then is
[P(E) sim e^{frac{-E}{T}} = e^{frac{- U(theta)}{T}} e^{frac{- K(m)}{T}}]
We now substitute into this equation, assuming a temperature (T) of 1 and a mass of 1:
[P(E) sim P(x | theta) P(theta) e^{frac{- m^2}{2}}]
Now on this formulation, the distribution of momentum is simply an ordinary regular ((e^{frac{- m^2}{2}}))! Thus, we are able to simply combine out the momentum and take (P(theta)) as samples from the posterior distribution:
[
begin{aligned}
& P(theta) =
int ! P(theta, m) mathrm{d}m = frac{1}{Z} int ! P(x | theta) P(theta) mathcal{N}(m|0,1) mathrm{d}m
& P(theta) = frac{1}{Z} int ! P(x | theta) P(theta)
end{aligned}
]
How does this work in apply? At each step, we
- pattern a brand new momentum worth from its marginal distribution (which is identical because the conditional distribution given (U), as they’re unbiased), and
- clear up for the trail of the particle. That is the place Hamilton’s equations come into play.
Hamilton’s equations (equations of movement)
For the sake of much less confusion, must you resolve to learn the paper, right here we swap to Radford Neal’s notation.
Hamiltonian dynamics operates on a d-dimensional place vector, (q), and a d-dimensional momentum vector, (p). The state area is described by the Hamiltonian, a operate of (p) and (q):
[H(q, p) =U(q) +K(p)]
Right here (U(q)) is the potential power (referred to as (U(theta)) above), and (Okay(p)) is the kinetic power as a operate of momentum (referred to as (Okay(m)) above).
The partial derivatives of the Hamiltonian decide how (p) and (q) change over time, (t), based on Hamilton’s equations:
[
begin{aligned}
& frac{dq}{dt} = frac{partial H}{partial p}
& frac{dp}{dt} = – frac{partial H}{partial q}
end{aligned}
]
How can we clear up this method of partial differential equations? The essential workhorse in numerical integration is Euler’s methodology, the place time (or the unbiased variable, generally) is superior by a step of measurement (epsilon), and a brand new worth of the dependent variable is computed by taking the (partial) by-product and including it to its present worth. For the Hamiltonian system, doing this one equation after the opposite seems like this:
[
begin{aligned}
& p(t+epsilon) = p(t) + epsilon frac{dp}{dt}(t) = p(t) − epsilon frac{partial U}{partial q}(q(t))
& q(t+epsilon) = q(t) + epsilon frac{dq}{dt}(t) = q(t) + epsilon frac{p(t)}{m})
end{aligned}
]
Right here first a brand new place is computed for time (t + 1), making use of the present momentum at time (t); then a brand new momentum is computed, additionally for time (t + 1), making use of the present place at time (t).
This course of may be improved if in step 2, we make use of the new place we simply freshly computed in step 1; however let’s immediately go to what’s really utilized in up to date software program, the leapfrog methodology.
Leapfrog algorithm
So after Hamiltonian, we’ve hit the second magic phrase: leapfrog. Not like Hamiltonian nevertheless, there may be much less thriller right here. The leapfrog methodology is “simply” a extra environment friendly option to carry out the numerical integration.
It consists of three steps, mainly splitting up the Euler step 1 into two components, earlier than and after the momentum replace:
[
begin{aligned}
& p(t+frac{epsilon}{2}) = p(t) − frac{epsilon}{2} frac{partial U}{partial q}(q(t))
& q(t+epsilon) = q(t) + epsilon frac{p(t + frac{epsilon}{2})}{m}
& p(t+ epsilon) = p(t+frac{epsilon}{2}) − frac{epsilon}{2} frac{partial U}{partial q}(q(t + epsilon))
end{aligned}
]
As you may see, every step makes use of the corresponding variable-to-differentiate’s worth computed within the previous step. In apply, a number of leapfrog steps are executed earlier than a proposal is made; so steps 3 and 1 (of the following iteration) are mixed.
Proposal – this key phrase brings us again to the higher-level “plan.” All this – Hamiltonian equations, leapfrog integration – served to generate a proposal for a brand new worth of the parameters, which may be accepted or not. The way in which that call is taken shouldn’t be explicit to HMC and defined intimately within the above-mentioned expositions on the Metropolis algorithm, so we simply cowl it briefly.
Acceptance: Metropolis algorithm
Below the Metropolis algorithm, proposed new vectors (q*) and (p*) are accepted with chance
[
min(1, exp(−H(q∗, p∗) +H(q, p)))
]
That’s, if the proposed parameters yield a better chance, they’re accepted; if not, they’re accepted solely with a sure chance that is dependent upon the ratio between previous and new likelihoods.
In concept, power staying fixed in a Hamiltonian system, proposals ought to all the time be accepted; in apply, lack of precision resulting from numerical integration could yield an acceptance charge lower than 1.
HMC in just a few traces of code
We’ve talked about ideas, and we’ve seen the maths, however between analogies and equations, it’s simple to lose observe of the general algorithm. Properly, Radford Neal’s paper (Neal 2012) has some code, too! Right here it’s reproduced, with only a few extra feedback added (many feedback have been preexisting):
# U is a operate that returns the potential power given q
# grad_U returns the respective partial derivatives
# epsilon stepsize
# L variety of leapfrog steps
# current_q present place
# kinetic power is assumed to be sum(p^2/2) (mass == 1)
HMC <- operate (U, grad_U, epsilon, L, current_q) {
q <- current_q
# unbiased customary regular variates
p <- rnorm(size(q), 0, 1)
# Make a half step for momentum initially
current_p <- p
# Alternate full steps for place and momentum
p <- p - epsilon * grad_U(q) / 2
for (i in 1:L) {
# Make a full step for the place
q <- q + epsilon * p
# Make a full step for the momentum, besides at finish of trajectory
if (i != L) p <- p - epsilon * grad_U(q)
}
# Make a half step for momentum on the finish
p <- p - epsilon * grad_U(q) / 2
# Negate momentum at finish of trajectory to make the proposal symmetric
p <- -p
# Consider potential and kinetic energies at begin and finish of trajectory
current_U <- U(current_q)
current_K <- sum(current_p^2) / 2
proposed_U <- U(q)
proposed_K <- sum(p^2) / 2
# Settle for or reject the state at finish of trajectory, returning both
# the place on the finish of the trajectory or the preliminary place
if (runif(1) < exp(current_U-proposed_U+current_K-proposed_K)) {
return (q) # settle for
} else {
return (current_q) # reject
}
}Hopefully, you discover this piece of code as useful as I do. Are we by but? Effectively, thus far we haven’t encountered the final magic phrase: NUTS. What, or who, is NUTS?
NUTS
NUTS, added to Stan in 2011 and a few month in the past, to TensorFlow Likelihood’s grasp department, is an algorithm that goals to avoid one of many sensible difficulties in utilizing HMC: The selection of variety of leapfrog steps to carry out earlier than making a proposal. The acronym stands for No-U-Flip Sampler, alluding to the avoidance of U-turn-shaped curves within the optimization panorama when the variety of leapfrog steps is chosen too excessive.
The reference paper by Hoffman & Gelman (Hoffman and Gelman 2011) additionally describes an answer to a associated issue: selecting the step measurement (epsilon). The respective algorithm, twin averaging, was additionally lately added to TFP.
NUTS being extra of algorithm within the pc science utilization of the phrase than a factor to elucidate conceptually, we’ll go away it at that, and ask the reader to learn the paper – and even, seek the advice of the TFP documentation to see how NUTS is applied there. As a substitute, we’ll spherical up with one other conceptual analogy, Michael Bétancourts crashing (or not!) satellite tv for pc (Betancourt 2017).
Methods to keep away from crashes
Bétancourt’s article is an superior learn, and a paragraph specializing in a single level made within the paper may be nothing than a “teaser” (which is why we’ll have an image, too!).
To introduce the upcoming analogy, the issue begins with excessive dimensionality, which is a given in most real-world issues. In excessive dimensions, as ordinary, the density operate has a mode (the place the place it’s maximal), however essentially, there can’t be a lot quantity round it – similar to with k-nearest neighbors, the extra dimensions you add, the farther your nearest neighbor will likely be.
A product of quantity and density, the one vital chance mass resides within the so-called typical set, which turns into increasingly more slim in excessive dimensions.
So, the everyday set is what we need to discover, however it will get increasingly more troublesome to seek out it (and keep there). Now as we noticed above, HMC makes use of gradient info to get close to the mode, but when it simply adopted the gradient of the log chance (the place) it could go away the everyday set and cease on the mode.
That is the place momentum is available in – it counteracts the gradient, and each collectively be sure that the Markov chain stays on the everyday set. Now right here’s the satellite tv for pc analogy, in Bétancourt’s personal phrases:
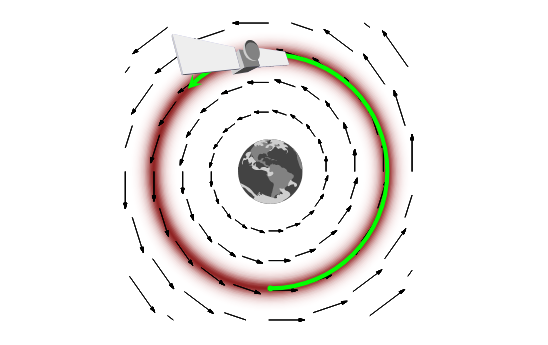
For instance, as an alternative of making an attempt to motive a few mode, a gradient, and a typical set, we are able to equivalently motive a few planet, a gravitational discipline, and an orbit (Determine 14). The probabilistic endeavor of exploring the everyday set then turns into a bodily endeavor of putting a satellite tv for pc in a secure orbit across the hypothetical planet. As a result of these are simply two completely different views of the identical mathematical system, they are going to undergo from the identical pathologies. Certainly, if we place a satellite tv for pc at relaxation out in area it can fall within the gravitational discipline and crash into the floor of the planet, simply as naive gradient-driven trajectories crash into the mode (Determine 15). From both the probabilistic or bodily perspective we’re left with a catastrophic final result.
The bodily image, nevertheless, offers a direct resolution: though objects at relaxation will crash into the planet, we are able to keep a secure orbit by endowing our satellite tv for pc with sufficient momentum to counteract the gravitational attraction. Now we have to watch out, nevertheless, in how precisely we add momentum to our satellite tv for pc. If we add too little momentum transverse to the gravitational discipline, for instance, then the gravitational attraction will likely be too robust and the satellite tv for pc will nonetheless crash into the planet (Determine 16a). However, if we add an excessive amount of momentum then the gravitational attraction will likely be too weak to seize the satellite tv for pc in any respect and it’ll as an alternative fly out into the depths of area (Determine 16b).
And right here’s the image I promised (Determine 16 from the paper):
And with this, we conclude. Hopefully, you’ll have discovered this useful – except you knew all of it (or extra) beforehand, during which case you most likely wouldn’t have learn this publish 🙂
Thanks for studying!
Kruschke, John Okay. 2010. Doing Bayesian Knowledge Evaluation: A Tutorial with r and BUGS. 1st ed. Orlando, FL, USA: Tutorial Press, Inc.
MacKay, David J. C. 2002. Info Concept, Inference & Studying Algorithms. New York, NY, USA: Cambridge College Press.

{kind=link}