

Constructing fashions that resolve a various set of duties has turn into a dominant paradigm within the domains of imaginative and prescient and language. In pure language processing, massive pre-trained fashions, comparable to PaLM, GPT-3 and Gopher, have demonstrated exceptional zero-shot studying of latest language duties. Equally, in laptop imaginative and prescient, fashions like CLIP and Flamingo have proven sturdy efficiency on zero-shot classification and object recognition. A pure subsequent step is to make use of such instruments to assemble brokers that may full completely different decision-making duties throughout many environments.
Nonetheless, coaching such brokers faces the inherent problem of environmental variety, since completely different environments function with distinct state motion areas (e.g., the joint area and steady controls in MuJoCo are essentially completely different from the picture area and discrete actions in Atari). This environmental variety hampers data sharing, studying, and generalization throughout duties and environments. Moreover, it’s tough to assemble reward features throughout environments, as completely different duties typically have completely different notions of success.
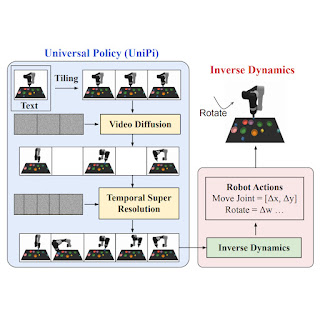
In “Studying Common Insurance policies by way of Textual content-Guided Video Technology”, we suggest a Common Coverage (UniPi) that addresses environmental variety and reward specification challenges. UniPi leverages textual content for expressing activity descriptions and video (i.e., picture sequences) as a common interface for conveying motion and remark conduct in several environments. Given an enter picture body paired with textual content describing a present purpose (i.e., the following high-level step), UniPi makes use of a novel video generator (trajectory planner) to generate video with snippets of what an agent’s trajectory ought to seem like to realize that purpose. The generated video is fed into an inverse dynamics mannequin that extracts underlying low-level management actions, that are then executed in simulation or by an actual robotic agent. We exhibit that UniPi permits the usage of language and video as a common management interface for generalizing to novel targets and duties throughout various environments.
 |
| Video insurance policies generated by UniPi. |
 |
| UniPi could also be utilized to downstream multi-task settings that require combinatorial language generalization, long-horizon planning, or internet-scale data. Within the backside instance, UniPi takes the picture of the white robotic arm from the web and generates video snippets in response to the textual content description of the purpose. |
UniPi implementation
To generate a legitimate and executable plan, a text-to-video mannequin should synthesize a constrained video plan beginning on the present noticed picture. We discovered it more practical to explicitly constrain a video synthesis mannequin throughout coaching (versus solely constraining movies at sampling time) by offering the primary body of every video as express conditioning context.
At a excessive degree, UniPi has 4 main parts: 1) constant video era with first-frame tiling, 2) hierarchical planning by means of temporal tremendous decision, 3) versatile conduct synthesis, and 4) task-specific motion adaptation. We clarify the implementation and profit of every part intimately beneath.
Video era by means of tiling
Current text-to-video fashions like Imagen sometimes generate movies the place the underlying surroundings state modifications considerably all through the period. To assemble an correct trajectory planner, it will be significant that the surroundings stays constant throughout all time factors. We implement surroundings consistency in conditional video synthesis by offering the noticed picture as extra context when denoising every body within the synthesized video. To realize context conditioning, UniPi instantly concatenates every intermediate body sampled from noise with the conditioned noticed picture throughout sampling steps, which serves as a powerful sign to take care of the underlying surroundings state throughout time.
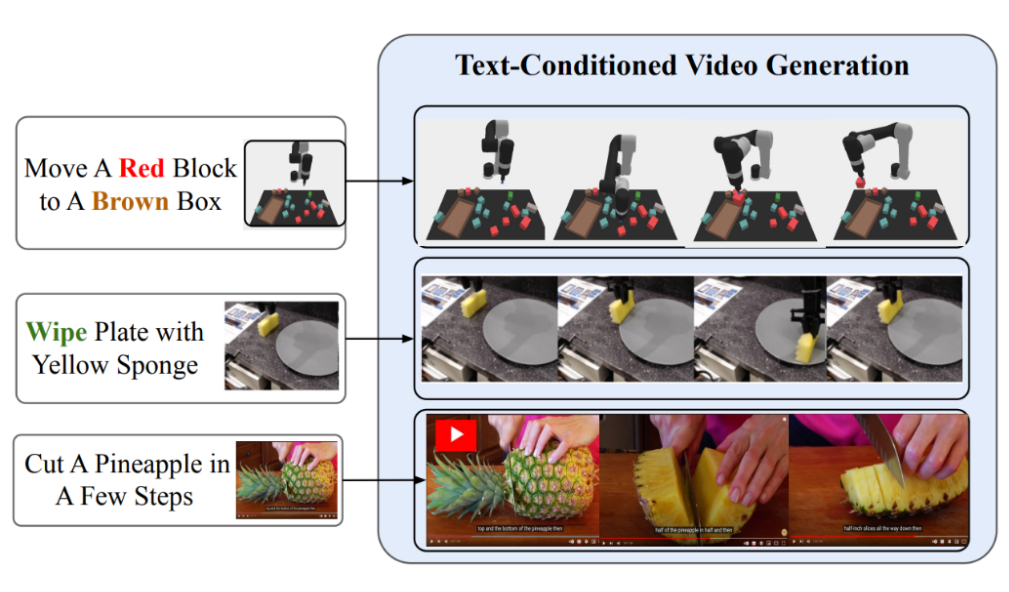 |
| Textual content-conditional video era permits UniPi to coach basic function insurance policies on a variety of knowledge sources (simulated, actual robots and YouTube). |
Hierarchical planning
When developing plans in high-dimensional environments with very long time horizons, instantly producing a set of actions to achieve a purpose state shortly turns into intractable as a result of exponential progress of the underlying search area because the plan will get longer. Planning strategies typically circumvent this concern by leveraging a pure hierarchy in planning. Particularly, planning strategies first assemble coarse plans (the intermediate key frames unfold out throughout time) working on low-dimensional states and actions, that are then refined into plans within the underlying state and motion areas.
Just like planning, our conditional video era process displays a pure temporal hierarchy. UniPi first generates movies at a rough degree by sparsely sampling movies (“abstractions”) of desired agent conduct alongside the time axis. UniPi then refines the movies to symbolize legitimate conduct within the surroundings by super-resolving movies throughout time. In the meantime, coarse-to-fine super-resolution additional improves consistency by way of interpolation between frames.
 |
| Given an enter remark and textual content instruction, we plan a set of pictures representing agent conduct. Photos are transformed to actions utilizing an inverse dynamics mannequin. |
Versatile behavioral modulation
When planning a sequence of actions for a given sub-goal, one can readily incorporate exterior constraints to modulate a generated plan. Such test-time adaptability could be carried out by composing a probabilistic prior incorporating properties of the specified plan to specify desired constraints throughout the synthesized motion trajectory, which can be suitable with UniPi. Particularly, the prior could be specified utilizing a realized classifier on pictures to optimize a specific activity, or as a Dirac delta distribution on a specific picture to information a plan in direction of a specific set of states. To coach the text-conditioned video era mannequin, we make the most of the video diffusion algorithm, the place pre-trained language options from the Textual content-To-Textual content Switch Transformer (T5) are encoded.
Job-specific motion adaptation
Given a set of synthesized movies, we practice a small task-specific inverse dynamics mannequin to translate frames right into a set of low-level management actions. That is unbiased from the planner and could be finished on a separate, smaller and doubtlessly suboptimal dataset generated by a simulator.
Given the enter body and textual content description of the present purpose, the inverse dynamics mannequin synthesizes picture frames and generates a management motion sequence that predicts the corresponding future actions. An agent then executes inferred low-level management actions by way of closed-loop management.
Capabilities and analysis of UniPi
We measure the duty success charge on novel language-based targets, and discover that UniPi generalizes properly to each seen and novel mixtures of language prompts, in comparison with baselines comparable to Transformer BC, Trajectory Transformer (TT), and Diffuser.
 |
| UniPi generalizes properly to each seen and novel mixtures of language prompts in Place (e.g., “place X in Y”) and Relation (e.g., “place X to the left of Y”) duties. |
Beneath, we illustrate generated movies on unseen mixtures of targets. UniPi is ready to synthesize a various set of behaviors that fulfill unseen language subgoals:
 |
| Generated movies for unseen language targets at check time. |
Multi-environment switch
We measure the duty success charge of UniPi and baselines on novel duties not seen throughout coaching. UniPi once more outperforms the baselines by a big margin:
 |
| UniPi generalizes properly to new environments when skilled on a set of various multi-task environments. |
Beneath, we illustrate generated movies on unseen duties. UniPi is additional in a position to synthesize a various set of behaviors that fulfill unseen language duties:
 |
| Generated video plans on completely different new check duties within the multitask setting. |
Actual world switch
Beneath, we additional illustrate generated movies given language directions on unseen actual pictures. Our strategy is ready to synthesize a various set of various behaviors which fulfill language directions:
 |
Utilizing web pre-training permits UniPi to synthesize movies of duties not seen throughout coaching. In distinction, a mannequin skilled from scratch incorrectly generates plans of various duties:
 |
To judge the standard of movies generated by UniPi when pre-trained on non-robot information, we use the Fréchet Inception Distance (FID) and Fréchet Video Distance (FVD) metrics. We used Contrastive Language-Picture Pre-training scores (CLIPScores) to measure the language-image alignment. We exhibit that pre-trained UniPi achieves considerably increased FID and FVD scores and a greater CLIPScore in comparison with UniPi with out pre-training, suggesting that pre-training on non-robot information helps with producing plans for robots. We report the CLIPScore, FID, and VID scores for UniPi skilled on Bridge information, with and with out pre-training:
| Mannequin (24×40) | CLIPScore ↑ | FID ↓ | FVD ↓ | ||||||||
| No pre-training | 24.43 ± 0.04 | 17.75 ± 0.56 | 288.02 ± 10.45 | ||||||||
| Pre-trained | 24.54 ± 0.03 | 14.54 ± 0.57 | 264.66 ± 13.64 |
| Utilizing present web information improves video plan predictions beneath all metrics thought of. |
The way forward for large-scale generative fashions for determination making
The optimistic outcomes of UniPi level to the broader course of utilizing generative fashions and the wealth of knowledge on the web as highly effective instruments to study general-purpose determination making programs. UniPi is just one step in direction of what generative fashions can deliver to determination making. Different examples embody utilizing generative basis fashions to offer photorealistic or linguistic simulators of the world wherein synthetic brokers could be skilled indefinitely. Generative fashions as brokers can even study to work together with complicated environments such because the web, in order that a lot broader and extra complicated duties can ultimately be automated. We sit up for future analysis in making use of internet-scale basis fashions to multi-environment and multi-embodiment settings.
Acknowledgements
We’d prefer to thank all remaining authors of the paper together with Bo Dai, Hanjun Dai, Ofir Nachum, Joshua B. Tenenbaum, Dale Schuurmans, and Pieter Abbeel. We wish to thank George Tucker, Douglas Eck, and Vincent Vanhoucke for the suggestions on this put up and on the unique paper.

{kind=link}