

In mammals, the contact modality develops sooner than the opposite senses, but it’s a much less studied sensory modality than the visible and auditory counterparts. It not solely permits environmental interactions, but additionally, serves as an efficient protection mechanism.

Determine 1: Rat utilizing the whiskers to work together with setting by way of contact
The position of contact in cellular robotic navigation has not been explored intimately. Nonetheless, contact seems to play an essential position in impediment avoidance and pathfinding for cellular robots. Proximal sensing usually is a blind spot for many lengthy vary sensors similar to cameras and lidars for which contact sensors might function a complementary modality.
Total, contact seems to be a promising modality for cellular robotic navigation. Nonetheless, extra analysis is required to totally perceive the position of contact in cellular robotic navigation.
Position of contact in nature
The contact modality is paramount for a lot of organisms. It performs an essential position in notion, exploration, and navigation. Animals use this mode of navigation extensively to discover their environment. Rodents, pinnipeds, cats, canine, and fish use this mode in another way than people. Whereas people primarily use contact sense for prehensile manipulation, mammals similar to rats and shrews depend on contact sensing for exploration and navigation as a result of their poor visible system by way of the vibrissa mechanism. This vibrissa mechanism is important for short-range sensing, which works in tandem with the visible system.
Synthetic contact sensors for robots
Synthetic contact sensor design has advanced during the last 4 many years. Nonetheless, these sensors aren’t as broadly utilized in cellular robotic methods as cameras and lidars. Cellular robots often make use of these lengthy vary sensors, however brief vary sensing receives comparatively much less consideration.
When designing the unreal contact sensors for cellular robotic navigation, we usually draw inspiration from nature, i.e., organic whiskers to derive bio-inspired synthetic whiskers. One such early prototype is proven in determine under.
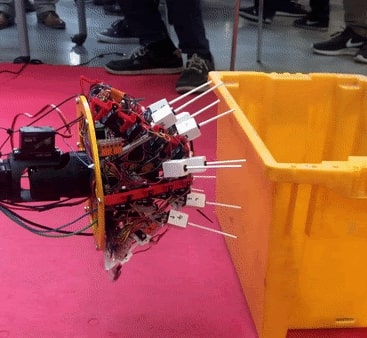
Determine 2: Bioinspired synthetic rat whisker array prototype V1.0
Nonetheless, there isn’t any cause for us to restrict the design improvements to 100% precisely mimicking organic whisker-like contact sensors. Whereas some researchers try to excellent the tapering of whiskers [1], we’re presently investigating summary mathematical fashions that may additional encourage a complete array of contact sensors [2].
Challenges with designing contact sensors for robots
There are lots of challenges when designing contact sensors for cellular robots. One key problem is the trade-off between weight, measurement, and energy consumption. The ability consumption of the sensors might be important, which might restrict their applicability in cellular robotic functions.
One other problem is to seek out the correct trade-off between contact sensitivity and robustness. The sensors should be delicate sufficient to detect small modifications within the setting, but sturdy sufficient to deal with the dynamic and harsh situations in most cellular robotic functions.
Future instructions
There’s a want for extra systematic research to know the position of contact in cellular robotic navigation. The present research are principally restricted to particular functions and situations geared in direction of dexterous manipulation and greedy. We have to perceive the challenges and limitations of utilizing contact sensors for cellular robotic navigation. We additionally must develop extra sturdy and power-efficient contact sensors for cellular robots.
Logistically, one other issue that limits using contact sensors is the shortage of overtly out there off the shelf contact sensors. Few analysis teams world wide are working in direction of their very own contact sensor prototype, biomimetic or in any other case, however all such designs are closed and very arduous to copy and enhance.
References
- Williams, Christopher M., and Eric M. Kramer. “Some great benefits of a tapered whisker.” PLoS one 5.1 (2010): e8806.
- Tiwari, Kshitij, et al. “Visibility-Impressed Fashions of Contact Sensors for Navigation.” 2022 IEEE/RSJ Worldwide Convention on Clever Robots and Methods (IROS). IEEE, 2022

Kshitij Tiwari
is a Postdoctoral Researcher occupied with path planning and SLAM for cellular robots and multi-agent methods.
Kshitij Tiwari
is a Postdoctoral Researcher occupied with path planning and SLAM for cellular robots and multi-agent methods.

{kind=link}